ZpracovĂĄnĂ dat RPAS a jejich vyuĆŸitelnost ve stavebnictvĂ
PĆedklĂĄdanĂœ text pojednĂĄvĂĄ o vyuĆŸitĂ RPAS (Remotely Piloted Aerial System) z hlediska stavebnictvĂ a pamĂĄtkovĂ© pĂ©Äe na pĆĂkladech jednotlivĂœch pĆĂpadovĂœch studiĂ. Pro ĂșÄely stavebnictvĂ a monitorovĂĄnĂ technologickĂœch areĂĄlĆŻ jsou vyuĆŸĂvĂĄny zejmĂ©na multirotorovĂ© systĂ©my, kterĂ© majĂ sice sloĆŸitÄjĆĄĂ ovlĂĄdĂĄnĂ, ale je moĆŸno je s ĂșspÄchem navĂĄdÄt ve velmi nĂzkĂ© vĂœĆĄce a malĂ© rychlosti okolo a nad objektem. ZĂĄsadnĂ pro jejich vyuĆŸitĂ je ale bezpeÄnĂĄ manipulace a zajiĆĄtÄnĂ prostoru po dohodÄ s vlastnĂkem Äi sprĂĄvcem objektu.
Ăvod
ÄlĂĄnek navazuje volnÄ na zĂĄkladnĂ informace o RPAS z ÄlĂĄnku „Drony vĆĄude nad nĂĄmi“ (Pavelka, 2016). V souÄasnĂ© dobÄ existuje pro tzv. „drony“ nÄkolik uĆŸĂvanĂœch zkratek. StarĆĄĂ UAV (unmanned aerial vehicle, tj. vlastnĂ leteckĂœ prostĆedek) Äi UAS (unmanned aerial system, tj. vlastnĂ leteckĂœ prostĆedek vÄetnÄ dalĆĄĂch zaĆĂzenĂ jako ĆĂdĂcĂho segmentu, plĂĄnovĂĄnĂ trasy apod.) se pomÄrnÄ vĆŸily, novÄjĆĄĂ a pĆesnÄjĆĄĂ vĂœraz RPAS (remotly piloted aircraft system) je sice sloĆŸitÄjĆĄĂ, ale lĂ©pe vystihuje vlastnĂ zaĆĂzenĂ, tj. jednĂĄ se o dĂĄlkovÄ pilotovanĂœ prostĆedek, za jehoĆŸ provoz existuje zodpovÄdnĂĄ osoba.
VyuĆŸitĂ RPAS („dronĆŻ“)
VyuĆŸitĂ RPAS je zĂĄvislĂ© na jeho typu, charakteru snĂmanĂ©ho objektu Äi plochy a prĂĄvnĂch pĆedpisech. OkĆĂdlenĂ© systĂ©my jsou vhodnÄjĆĄĂ pro kolmĂ© snĂmkovĂĄnĂ Äi tvorbu videa, hodĂ se na vÄtĆĄĂ oblasti a jejich uplatnÄnĂ je zejmĂ©na pĆi mapovacĂch technologiĂch a monitorovĂĄnĂ vÄtĆĄĂch oblastĂ. MultirotorovĂ© systĂ©my mohou pomalu oblĂ©tat objekty, „viset“ ve vzduchu nad urÄitĂœm bodem a vzhledem k letovĂ© vĂœdrĆŸi se hodĂ na menĆĄĂ oblasti a stavebnĂ objekty. Legislativa platĂ pro oba typy stejnĂĄ. LevnĂ© typy RPAS jsou nejÄastÄji vyuĆŸĂvĂĄny pro tvorbu videa nad danĂœm ĂșzemĂm.
ProgramovĂĄnĂ letu a zpracovĂĄnĂ dat
VĂœznamnou souÄĂĄstĂ celĂ©ho procesu vyuĆŸitĂ RPAS je samozĆejmÄ zpracovatelskĂœ a ĆĂdĂcĂ software. Toho je dnes mnoho druhĆŻ, logicky rĆŻznĂ© kvality, ceny, vĂœkonnosti a pĆesnosti vĂœsledkĆŻ. Zde je nutno dÄlit software na ovlĂĄdĂĄnĂ RPAS a provedenĂ samotnĂ©ho snĂmkovĂ©ho letu a software pro zpracovĂĄnĂ obrazovĂœch dat.
Pro plĂĄnovĂĄnĂ letu je vhodnĂ© vyuĆŸĂt firemnĂ software, dodĂĄvanĂœ s profesionĂĄlnĂm systĂ©mem, kupĆ. eMotion od SenseFly k RPAS EBee. Ten vynikĂĄ jednoduchĂœm pouĆŸitĂm a skuteÄnÄ profesionĂĄlnĂm pĆĂstupem k mapovacĂm pracĂm s RPAS. PlĂĄnuje snĂmkovĂœ let a asistuje pĆi jeho provedenĂ; na externĂm notebooku ukazuje vĆĄechny nutnĂ© informace i meteorologickĂ© parametry bÄhem letu. ExistujĂ samozĆejmÄ ale i jinĂ© ĆĂdĂcĂ programovĂ© produkty, napĆ. Pixhawk autopilot, PX4 Flight Stack Äi APM Flight Stack.
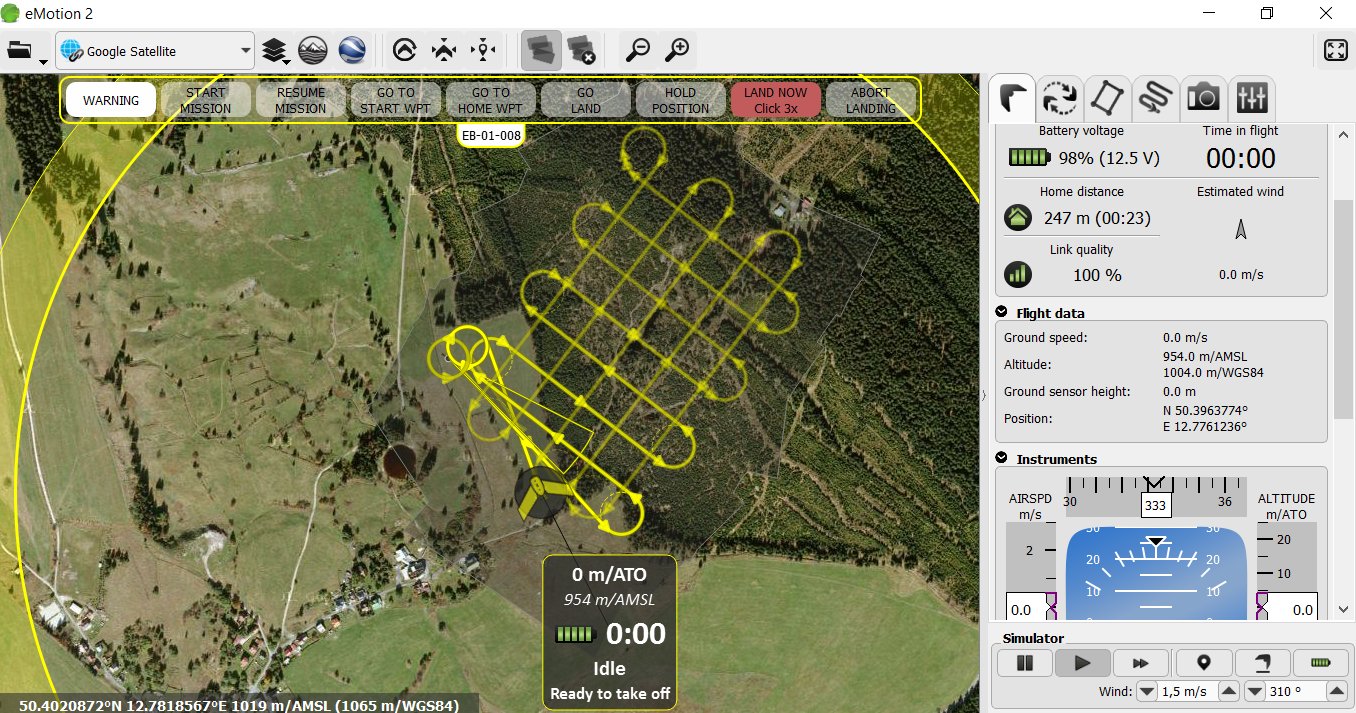
Obr. 1: LetovĂœ panel software eMotion (SenseFly) ukazuje vĆĄechny parametry letu, trajektorii, stav bateriĂ, smÄr vÄtru, kvalitu pĆenosovĂ©ho signĂĄlu na podkladÄ druĆŸicovĂ©ho nebo leteckĂ©ho ortofota.
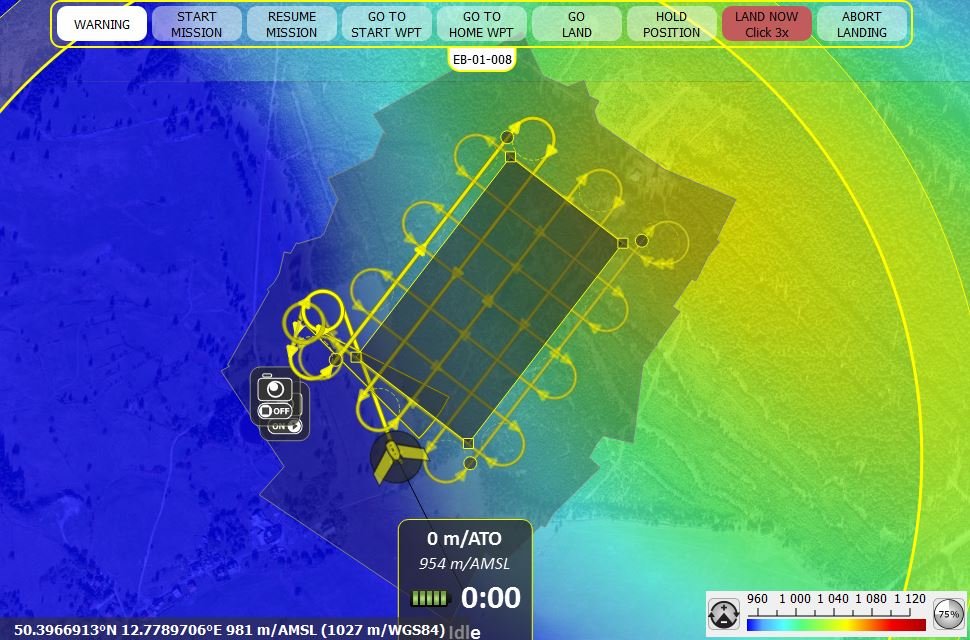
Obr. 2: LetovĂœ panel software eMotion (SenseFly) pouĆŸĂvĂĄ takĂ© volnĂœ digitĂĄlnĂ model terĂ©nu, pokud je k dispozici.
Pro zpracovĂĄnĂ dat existuje skuteÄnÄ dnes jiĆŸ velkĂœ vĂœbÄr software. NaĆĄe zkuĆĄenosti jsou pouze s vybranĂœm softwarem, obecnÄ a nejÄastÄji je dnes vyuĆŸĂvĂĄn software AgiSoft PhotoScan (ten je urÄen obecnÄ pro tvorbu prostorovĂœch modelĆŻ ze souboru fotografiĂ technologiĂ IBMR – Image Based Modelling and Rendering na zĂĄkladÄ obrazovĂ© korelace). Z profesionĂĄlnĂho software lze jmenovat Pix4D, 3DF Zephyr, Ikaros, Aerogis, Dronemapper aj., kterĂ© lze doporuÄit z fotogrammetrickĂ©ho hlediska, existuje i volnĂœ (free) software v podobÄ software Insight 3D Äi kupĆ. Bundler. PorovnĂĄnĂ software se zabĂœvala a stĂĄle zabĂœvĂĄ Ćada autorĆŻ (ĆehĂĄk, 2012).
ZkuĆĄenosti laboratoĆe fotogrammetrie, FSv ÄVUT v Praze

Obr. 3: EBee od firmy SenseFly
RPAS s nĂĄzvem EBee od firmy SenseFly je klasickĂ© letadlo s odnĂmatelnĂœmi kĆĂdly a tlaÄnou vrtulĂ. UmoĆŸĆuje automatickĂœ snĂmkovĂœ let s dobou letu aĆŸ 40 minut. K dispozici jsou rĆŻznĂ© kamery pro viditelnĂ© a blĂzkĂ© infraÄervenĂ© zĂĄĆenĂ, vyrĂĄbÄna je multispektrĂĄlnĂ a termĂĄlnĂ kamery (pĆed letem je nutno vybrat ovĆĄem jen jednu vzhledem k nosnosti prostĆedku). VyuĆŸitĂ je ĆĄirokĂ© – od klasickĂ©ho mapovĂĄnĂ, tvorby ortofota s vysokĂœm rozliĆĄenĂm (velikost pixelu aĆŸ 3 cm), tvorby velmi pĆesnĂ©ho digitĂĄlnĂho modelu povrchu aĆŸ po monitorovĂĄnĂ stavu vegetace (napĆ. pomocĂ vegetaÄnĂho indexu NDVI). ObecnÄ lze ale ĆĂci, ĆŸe se jednĂĄ o mapovacĂ a monitorovacĂ systĂ©m pro ploĆĄnĂœ sbÄr dat, kterĂœ mĆŻĆŸe s ĂșspÄchem konkurovat leteckĂ© Äi druĆŸicovĂ© fotogrammetrii v malĂœch ĂșzemĂch (nutno poznamenat, ĆŸe geometrickĂ© rozliĆĄenĂ druĆŸicovĂœch dat je dnes jiĆŸ v extrĂ©mnĂm pĆĂpadÄ 31 cm (!), bÄĆŸnÄ 50 cm a u leteckĂœch dat je bÄĆŸnĂĄ velikost pixelu 10–25 cm).

Obr. 4: Hexakopter
RPAS Hexakopter je produkt nÄmeckĂ© firmy Mikrokopter. Ć eĆĄtivrtulovĂĄ verze je schopna nĂ©st i klasickou digitĂĄlnĂ zrcadlovku, typickĂœ let je kolem 15–20 minut podle vybavenĂ. Do zavÄĆĄenĂ© otoÄnĂ© pĆĂstrojovĂ© ploĆĄiny lze umĂstit digitĂĄlnĂ kameru, poĆizovat ĆĄikmĂ© i svislĂ© snĂmky, poĆizovat video. VyuĆŸĂt lze ale i multispektrĂĄlnĂ komoru (R,G,B,NIR – Tetracam) Äi miniaturnĂ termokameru (napĆ. Optris ThermoImager TIM) a dalĆĄĂ. MultikoptĂ©ry jsou vhodnĂ© pro menĆĄĂ ploĆĄnĂ© oblasti, napĆ. archeologickĂ© vykopĂĄvky menĆĄĂho rozsahu, stavebnĂ objekty, revize objektĆŻ, pamĂĄtkovĂĄ pĂ©Äe, monitorovĂĄnĂ elektrickĂ©ho vedenĂ, pĆehrad, vÄĆŸĂ aj. (pozor, tĂ©mÄĆ vĆĄe je ale v rozporu s DoplĆkem X pro vyuĆŸitĂ RPAS v ÄR). NicmĂ©nÄ, tyto moĆŸnosti vyuĆŸitĂ jsou standardnÄ nabĂzeny a ukazovĂĄny na vĆĄech svÄtovĂœch odbornĂœch akcĂch.
NĂĄsledujĂcĂ pĆĂkladovĂ© studie jsou z oblasti stavebnictvĂ, pamĂĄtkovĂ© pĂ©Äe, dokumentace a monitorovĂĄnĂ staveb. PopisujĂ vyuĆŸitĂ multikoptĂ©r na starĆĄĂch projektech; v souÄasnosti je jejich vyuĆŸitĂ pro tyto prĂĄce v nÄkterĂœch pĆĂpadech problematickĂ© z dĆŻvodu platnosti pĆedpisĆŻ pro vyuĆŸitĂ RPAS v ÄR (od 1. 3. 2012 platĂ DoplnÄk X), pokud se jednĂĄ o veĆejnĂœ prostor.
PrĆŻzkum a dokumentace stavebnĂho objektu
Tento typ projektĆŻ Äi pracĂ je typickĂœ pro multirotorovĂ© systĂ©my. Startovat lze z velmi malĂ© oblasti, let mĆŻĆŸe bĂœt pomalĂœ a svislĂœ, coĆŸ je ideĂĄlnĂ pĆedpoklad pro monitorovĂĄnĂ stavu stavebnĂch a technologickĂœch objektĆŻ. Jak ale vyplĂœvĂĄ z „DoplĆku X“, ploĆĄnÄ mapovat Äi monitorovat hustÄ zastavÄnĂĄ ĂșzemĂ nelze. PĆesto je pĆi zajiĆĄtÄnĂ relativnÄ malĂ©ho okolĂ letovĂ© oblasti let bezpeÄnĂœ a monitorovacĂ prĂĄce jsou ekonomickĂ© a rychlĂ©. Je tedy alespoĆ nutno zajistit blĂzkĂ© okolĂ a dohodnout se na podmĂnkĂĄch se sprĂĄvcem Äi vlastnĂkem objektu.
Jako pĆĂklad lze uvĂ©st monitorovĂĄnĂ ĆĄpatnÄ pĆĂstupnĂœch ÄĂĄstĂ historickĂ©ho objektu. PĆi dokumentaci stavu fasĂĄdy byla provedeno fotogrammetrickĂ© zamÄĆenĂ jednotlivĂœch fasĂĄd, kterĂ© pĆedpoklĂĄdĂĄ urÄitĂœ odstup od objetu pro vhodnĂ© snĂmkovĂĄnĂ. V pĆĂpadÄ, ĆŸe fasĂĄda je tÄsnÄ pĆimknuta k jinĂ© stavbÄ, v okolĂ je mnoĆŸstvĂ vzrostlĂ© vegetace Äi vrchnĂ ÄĂĄst je (napĆ. z dĆŻvody pĆeÄnĂvajĂcĂ ĆĂmsy) neviditelnĂĄ, je vyuĆŸitĂ RPAS pĆĂnosnĂ©. Stavba leĆĄenĂ a Äi pĆĂjezd ploĆĄiny jsou buÄ pĆĂliĆĄ drahĂ© a pomalĂ© nebo i technicky neproveditelnĂ©.

Obr. 5: Hexakopter pĆi monitorovĂĄnĂ nepĆĂstupnĂ© ÄĂĄsti fasĂĄdy, zĂĄmek LitomyĆĄl, foto K. Pavelka, 2011.

Obr. 6 : UkĂĄzka snĂmku z dokumentaÄnĂho letu; snĂmkovĂĄnĂ zdola ĆĄpatnÄ viditelnĂœch oblastĂ bylo provedeno v nÄkolika minutĂĄch, nebylo potĆeba leĆĄenĂ a pĆĂjezd ploĆĄiny do parkovĂ© ÄĂĄsti areĂĄlu. ZĂĄmek LitomyĆĄl, foto K. Pavelka, M. ĆehĂĄk, 2011.
Äastou Ășlohou je tvorba videa pro ĂșÄely PR, reklamy Äi jednoduchou vizuĂĄlnĂ kontrolu vrchnĂ ÄĂĄsti budovy.

Obr. 7: UCEEB, ÄVUT v Praze, snĂmky, poĆĂzenĂ© za ĂșÄelem PR do dokonÄenĂ objektu; hexakopter, foto a video B. MichalĂk a K. Pavelka, 2014.
MapovĂĄnĂ sklĂĄdek
SklĂĄdky jsou rĆŻznĂ© povahy, nÄkterĂ© jevĂ vĂœznamnou termĂĄlnĂ aktivitu dĂky typu materiĂĄlu a procesĆŻm uvnitĆ sklĂĄdky, jinĂ© jsou termĂĄlnÄ neaktivnĂ, ale mohou ohrozit ĆŸivotnĂ prostĆedĂ. SledovĂĄnĂ kubatury, charakteru sklĂĄdky, vlivu na okolnĂ objekty a ĂșzemĂ jsou klasickĂ© Ășkoly prĂĄvÄ pro RPAS – jednĂĄ se o relativnÄ malĂ© lokality, Äasto ĆĄpatnÄ pĆĂstupnĂ© Äi nebezpeÄnĂ©. NÄkolikaminutovĂœ let nad takovĂœmto objektem zajistĂ velmi jednoduĆĄe kontrolu ĂșzemĂ.
Na nĂĄsledujĂcĂch obrĂĄzcĂch je ukĂĄzka jednoduchĂ© dokumentace sklĂĄdky pomocĂ kamery s nĂzkĂœm grafickĂœm rozliĆĄenĂm (bÄĆŸnĂ© video). Video bylo upraveno do jednotlivĂœch snĂmkĆŻ s intervalem jednĂ© vteĆiny, oblast sklĂĄdky byla zpracovĂĄna pomocĂ software AgiSoft PhotoScan do podoby texturovanĂ©ho modelu a ortofota. V detailu je ale vidÄt, ĆŸe kvalita vĂœstupu z videa nenĂ dostateÄnĂĄ pro profesionĂĄlnĂ vyuĆŸitĂ. DalĆĄĂ obrazovĂ© vĂœstupy sklĂĄdky u ĆœaclĂ©Će byly poĆĂzeny profesionĂĄlnĂm systĂ©mem, kterĂœ garantuje vĂœraznÄ lepĆĄĂ vĂœsledky zejmĂ©na dĂky kvalitnĂ kameĆe.

Obr. 8: SklĂĄdka modelovanĂĄ pomocĂ snĂmkĆŻ z videokamery (H. StrakovĂĄ, K. Pavelka, 2013)

Obr. 9: Ortofoto sklĂĄdky z snĂmkĆŻ, odvozenĂœch z videa (H. StrakovĂĄ, K. Pavelka, 2013)

Obr. 10: Detail hornĂho pravĂ©ho rohu pĆedeĆĄlĂ©ho obrĂĄzku jasnÄ ukazuje chyby v ortofotu (zvlnÄnĂ budov, ĆĄikmĂœ komĂn aj.), kterĂ© jsou zpĆŻsobeny nekvalitnĂmi snĂmky (bÄĆŸnĂ© video) a z nich odvozenĂœm nepĆesnĂœm digitĂĄlnĂm modelem povrchu (H. StrakovĂĄ, K. Pavelka, 2013)
MonitorovĂĄnĂ termĂĄlnĂ aktivity
MonitorovĂĄnĂ termĂĄlnĂ aktivity objektĆŻ Äi areĂĄlĆŻ patĆĂ jiĆŸ delĆĄĂ dobu k bÄĆŸnĂœm technologiĂm. TermĂĄlnĂ kamery ale majĂ pomÄrnÄ malĂ© rozliĆĄenĂ a byly v nedĂĄvnĂ© dobÄ znaÄnÄ hmotnĂ© a velmi drahĂ©. PoslednĂ lĂ©ta pĆinesla vĂœraznĂ© snĂĆŸenĂ cen tepelnĂœch detektorĆŻ, kterĂ© vedly ke snĂĆŸenĂ ceny, zmenĆĄily se tĂ©ĆŸ kompletnĂ kamery, kterĂ© dnes mohou bĂœt velikosti krabiÄky od zĂĄpalek. I kdyĆŸ jsou cenovÄ dostupnÄjĆĄĂ, stĂĄle stojĂ pĆes sto tisĂc KÄ; bÄĆŸnÄ ale pracujĂ jako klasickĂ© video-kamery. PoĆizujĂ tedy videozĂĄbÄr, kterĂœ je nutno dĂĄle zpracovat. Pokud se poĆŸaduje jen pĆehlĂdky a monitorovanĂ©ho objektu Äi dokumentaÄnĂ obrĂĄzky, nenĂ obyÄejnÄ se zpracovĂĄnĂm problĂ©m. Pokud mĂĄ bĂœt ale vĂœsledkem kupĆ. termĂĄlnĂ tematickĂĄ mapa, zpracovĂĄnĂ nenĂ jednoduchĂ©. VideozĂĄbÄry je nutno zpracovat do souboru snĂmkĆŻ, kterĂ© se ve fotogrammetrickĂ©m programu dajĂ zpracovat do formy ortofota. BohuĆŸel, vÄtĆĄina programovĂœch produktĆŻ, pracujĂcĂch na bĂĄzi obrazovĂ© korelace, potĆebuje pro kvalitnĂ zpracovĂĄnĂ znaÄnĂœ pĆekryt snĂmkĆŻ a vysokĂ© rozliĆĄenĂ, coĆŸ u termĂĄlnĂch snĂmkĆŻ nenĂ bÄĆŸnĂ©. DĂĄle nastĂĄvĂĄ problĂ©m s georeferencovĂĄnĂm dat; vlĂcovacĂ body se ĆĄpatnÄ vytvĂĄĆĂ jako umÄlĂ© cĂle, vyhledĂĄnĂ pĆirozenĂœch vlĂcovacĂch bodĆŻ nenĂ jednoduchĂ© kvĆŻli nĂzkĂ©mu rozliĆĄenĂ a odliĆĄnĂ©mu pohledu. Pokud RPAS nenĂ vybaven RTK GNSS systĂ©mem a moĆŸnostĂ pĆihrĂĄvĂĄnĂ polohovĂœch a orientaÄnĂch dat k videodatĆŻm, je jistou moĆŸnostĂ buÄ pĆidat do systĂ©mu menĆĄĂ RGB kameru, nebo provĂ©st dalĆĄĂ let s klasickĂœm digitĂĄlnĂm fotoaparĂĄtem.

Obr. 11: DetailnĂ pohled na ĆĄikmo umĂstÄnou termĂĄlnĂ minikameru Optris TIM 160 (160×120 pixelĆŻ) a malou RGB kameru pro lokalizaci a videonĂĄhled trasy, oktokopter. Foto M. ĆehĂĄk, 2012.
V roce 2012 se podaĆilo pomocĂ kombinace RGB dat z rekognoskaÄnĂ kamery a termĂĄlnĂ kamery vytvoĆit i termĂĄlnĂ orotofoto tepelnÄ aktivnĂ sklĂĄdky v ĆœaclĂ©Ći. Zde se ukĂĄzaly vĂœhody bezkontaktnĂho monitorovĂĄnĂ nepĆĂstupnĂ© Äi ĆĄpatnÄ pĆĂstupnĂ© lokality. Jinou moĆŸno stĂ je klasickĂĄ pĆehlĂdka tepelnĂœch ĂșnikĆŻ staveb, kterĂĄ ale legislativnÄ narĂĄĆŸĂ na nemoĆŸnost lĂ©tat nad hustÄ zastavÄnou oblastĂ. DalĆĄĂ, v souÄasnĂ© dobÄ velmi ĆŸĂĄdanĂĄ aplikace, je monitorovĂĄnĂ sluneÄnĂch panelĆŻ a jejich celkĆŻ pomocĂ termĂĄlnĂ kamery (detekuje vadnĂ© ÄĂĄsti panelĆŻ Äi celĂ© vadnĂ© panely), monitorovĂĄnĂ vĂœrobnĂch hal z hlediska ĂșnikĆŻ tepla apod.
V souÄasnĂ© dobÄ jsou dostupnĂ© malĂ© termoviznĂ kamery Optris s dvojnĂĄsobnĂœm rozliĆĄenĂm a tĆetinovou cenou oproti roku 2010; ve verzi pro RPAS jsou vybaveny i miniaturnĂm poÄĂtaÄem. CelkovĂĄ vĂĄha systĂ©mu ÄinĂ asi 450 g. V roce 2015 se podaĆilo poĆĂdit kvalitnĂ odlehÄenou termĂĄlnĂ kameru Thermoimager i pro okĆĂdlenĂœ systĂ©m EBee s rozliĆĄenĂm 640×512 v 12bitovĂ© podobÄ dat. TechnickĂœ pokrok jde velmi rychle kupĆedu, otĂĄzkou je, kde na to vĆĄe shĂĄnÄt finance…
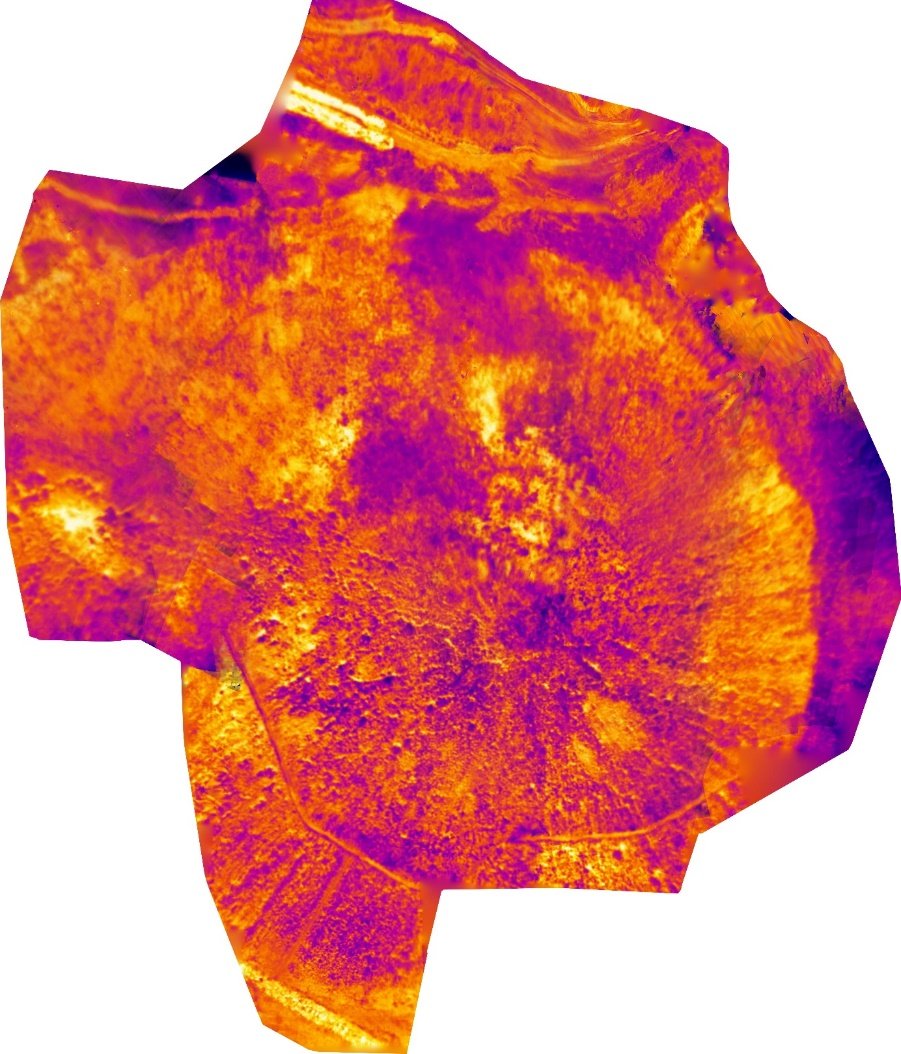
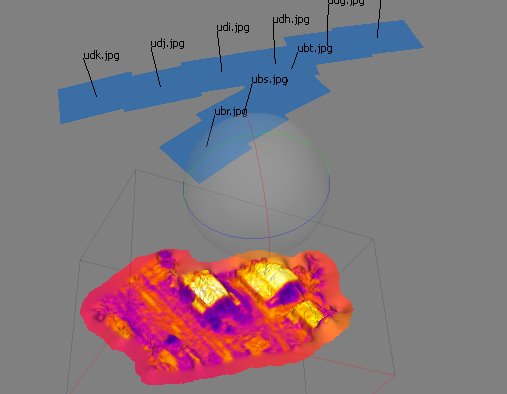
Obr. 12: VĂœsledky monitorovĂĄnĂ termĂĄlnĂ aktivity sklĂĄdky ĆœaclĂ©Ć. VĂœsledkem bylo ortofoto, digitĂĄlnĂ model reliĂ©fu a prvnĂ zveĆejnÄnĂ© termĂĄlnĂ ortofoto. M. ĆehĂĄk, H. StrakovĂĄ a K. Pavelka, 2012.
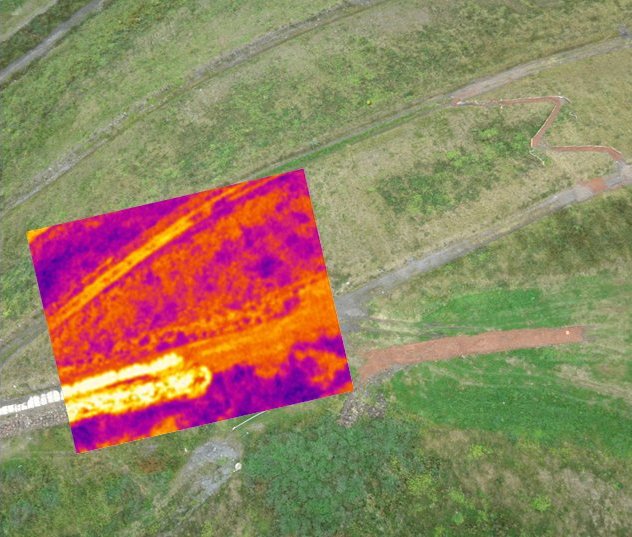
Obr. 13: SlouÄenĂ termĂĄlnĂch dat s klasickĂœm snĂmkem, poĆĂzenĂœm ve viditelnĂ©m oboru spektra (sklĂĄdka ĆœaclĂ©Ć, M.ĆehĂĄk, 2012)
Obr. 14: UkĂĄzka 3D modelovĂĄnĂ stavebnĂch objektĆŻ z termoviznĂ kamery Optris TIM 160 s nĂzkĂœm rozliĆĄenĂm (H. StrakovĂĄ, K. Pavelka, 2013)
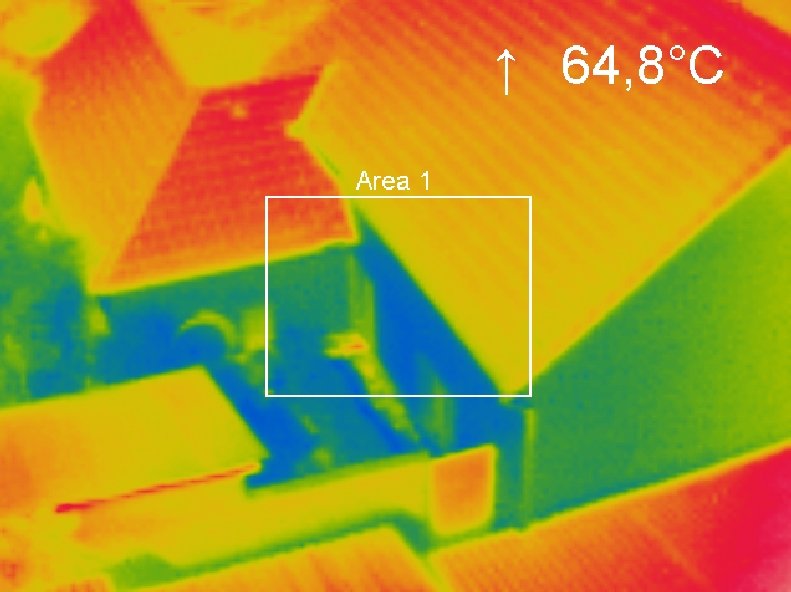
Obr. 15: TermĂĄlnĂ snĂmek, ukazujĂcĂ tepelnĂ© Ășniky ze staveb (hexakopter, Optris TIM 160), ĆehĂĄk, 2013

Obr. 16: SklĂĄdka ĆœaclĂ©Ć. Ortofotomozaika, RPAS hexakopter, pouĆŸita stĆednÄ kvalitnĂ kompaktnĂ kamera Canon. M. ĆehĂĄk, H. StrakovĂĄ a K. Pavelka, 2012.
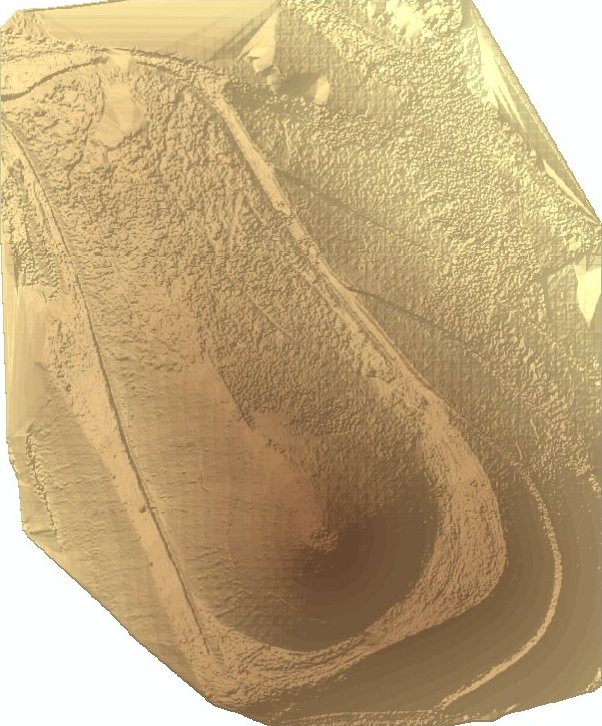
Obr. 17: SklĂĄdka ĆœaclĂ©Ć. PĆesnĂœ digitĂĄlnĂ model povrchu. M.ĆehĂĄk, H.StrakovĂĄ a K.Pavelka, 2012.
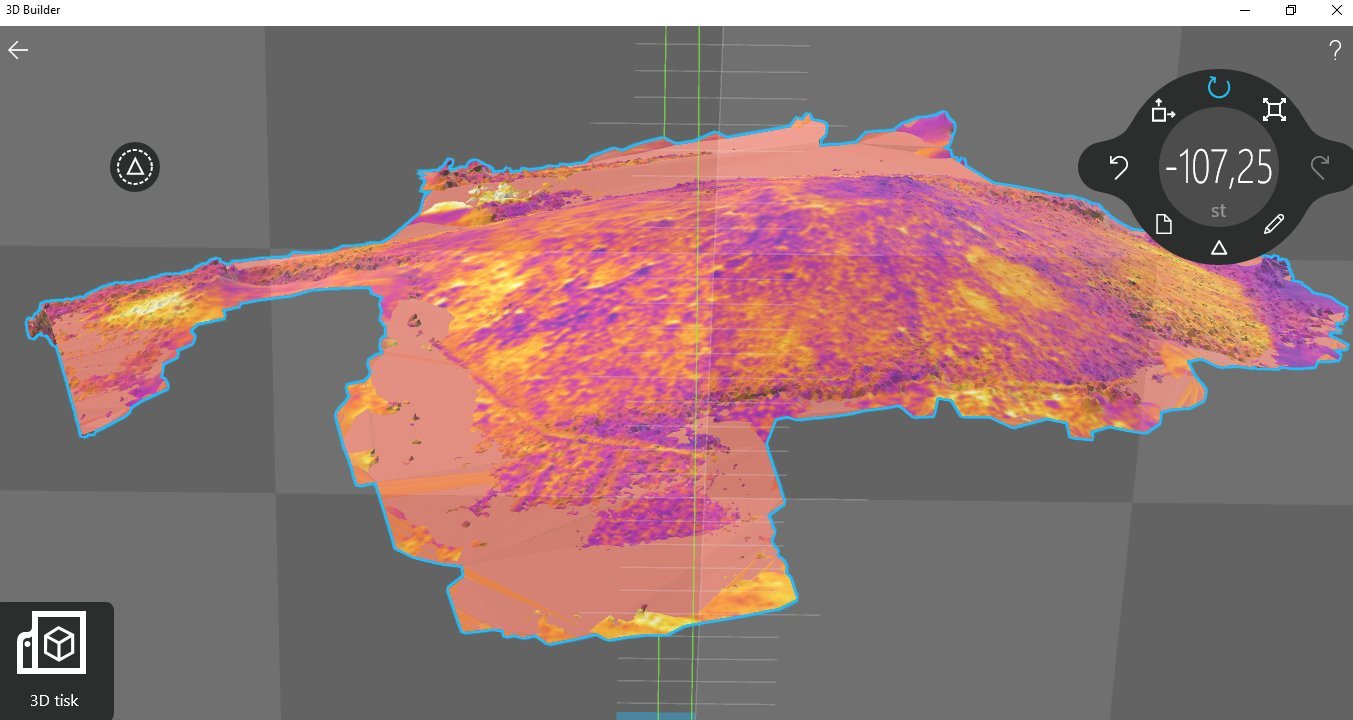
Obr. 18: DigitĂĄlnĂ prostorovĂœ model texturovanĂœ termĂĄlnĂm ortofotem, zobrazenĂœ v software 3D Builder, kterĂœ umoĆŸĆuje prohlĂĆŸenĂ prostorovĂ©ho modelu a jeho vizualizaci a slouĆŸĂ i pro moĆŸnĂœ 3D tisk objektu (M. ĆehĂĄk, K. Pavelka, 2013)
Zde je vhodnĂ© uvĂ©st odkaz na velmi uĆŸiteÄnou pomĆŻcku – speciĂĄlnĂ program MAIA, kterĂœ v prostĆedĂ mobilĆŻ (Android), tabletĆŻ a dalĆĄĂch prostĆedkĆŻ podĂĄvĂĄ v kaĆŸdĂ©m okamĆŸiku pĆehled o vĆĄech omezenĂch, vyhlĂĄĆĄenĂœch ĆĂzenĂm leteckĂ©ho provozu o aktivovanĂœch prostorech a dĂĄvĂĄ pĆehled o pohybu a pracĂch dalĆĄĂch RPAS v blĂzkĂ©m i vzdĂĄlenĂ©m okolĂ a podporuje tak bezpeÄnost pouĆŸitĂ RPAS v leteckĂ©m provozu ÄR; aplikace takĂ© slouĆŸĂ zĂĄroveĆ jako denĂk letĆŻ (funkÄnĂ od konce dubna 2016).
https://play.google.com/store/apps/details?id=cz.togle.droners&hl=cs
V dalĆĄĂm dĂle seriĂĄlu se budeme vÄnovat tĂ©matu vyuĆŸitĂ RPAS pro mapovĂĄnĂ a monitoring. ZĂĄvÄr a literaturu najdete na konci tĆetĂho dĂlu.
VĂœzkum a vĂœsledky v tomto ÄlĂĄnku byly podpoĆeny grantem MKÄR DF13P01OVV002.
Text druhĂ©ho ÄlĂĄnku vhodnÄ navazuje na prvnĂ dĂl a pojednĂĄvĂĄ o vyuĆŸitĂ RPAS ve stavebnictvĂ a pamĂĄtkovĂ© pĂ©Äi a na praktickĂœch pĆĂkladech pĆedvĂĄdĂ zkuĆĄenosti pracovnĂkĆŻ a doktorandĆŻ Katedry geomatiky stavebnĂ fakulty ÄVUT. Tato skuteÄnost se projevuje i na popisu pĆĂpadovĂœch studiĂ, kterĂ© jsou poplatnĂ© RPAS prostĆedkĆŻm, kterĂ© katedra vlastnĂ (ale asi je vhodnÄjĆĄĂ popisovat zkuĆĄenosti vlastnĂ, neĆŸ zkuĆĄenosti pĆevzatĂ©). Naproti tomu jsou uvedeny vĆĄechny znĂĄme plĂĄnovacĂ a navigaÄnĂ softwary a softwary pro zpracovĂĄnĂ snĂmkĆŻ pro tvorbu digitĂĄlnĂch modelĆŻ povrchĆŻ a bezeĆĄvĂœch ortofotomap. Bylo by asi vhodnĂ©, aby se autor vĂce zmĂnil o speciĂĄlnĂm programu MAIA, kterĂœ v androidnĂm prostĆedĂ mobilĆŻ, tabletĆŻ a dalĆĄĂch prostĆedkĆŻ podĂĄvĂĄ v kaĆŸdĂ©m okamĆŸiku pĆehled o vĆĄech omezenĂch vyhlĂĄĆĄenĂœch ĆĂzenĂm leteckĂ©ho provozu o aktivovanĂœch prostorech a dĂĄvĂĄ pĆehled o pohybu a pracĂch dalĆĄĂch RPAS v blĂzkĂ©m i vzdĂĄlenĂ©m okolĂ a podporuje tak bezpeÄnost pouĆŸitĂ RPAS v leteckĂ©m provozu ÄR a zĂĄroveĆ slouĆŸĂ jako denĂk letĆŻ. V textu jsou podrobnÄ zmĂnÄny i dalĆĄĂ senzory, kterĂ© mohou potenciĂĄlnÄ poslouĆŸit ve stavebnictvĂ a k ĆeĆĄenĂ ĂșkolĆŻ pamĂĄtkovĂ© pĂ©Äe. Ve vĆĄech pĆĂpadech autor upozorĆuje na nutnou bezpeÄnost provozu a v mnohĂ©m i na moĆŸnĂ© prohĆeĆĄky svĂœch studentĆŻ. NicmĂ©nÄ vĆĄechny jimi uskuteÄnÄnĂ© lety pĆĂpadovĂœch studiĂ byly uskuteÄnÄny na zĂĄkladÄ souhlasu vlastnĂka objetku a pozemkĆŻ. U jednotlivĂœch studiĂch uvĂĄdĂ autor nejen moĆŸnosti a vĂœhody, ale i nevĂœhody nÄkterĂœch ĆeĆĄenĂ a chyby pĆi tvorbÄ vĂœĆĄe znĂnÄnĂœch produktĆŻ.
Presented text discusses the use of RPAS (Remotely Piloted Aerial System) in the building industry and heritage preservation. It provides information of various case studies and shows examples. For the purposes of building industry and technological area monitoring multicopter systems are mainly used. They have more complex control, but they can be successfully navigated in very low heights and low speeds around and above the object. Safe handling and ensuring the area after agreement with the owner or facility manager is crucial for their use.