VyuéƒitûÙ cenová dostupnû§ch senzoré₤ pro péesnou klasifikaci materiûÀlé₤ ve stavebnûÙch sutûÙch, áûÀst 2
Bez efektivnûÙ klasifikace materiûÀlé₤ ve stavebnûÙch sutûÙch nelze zajistit jejich péesnûˋ téûÙdánûÙ a nûÀslednûˋ hodnotnûˋ vyuéƒitûÙ. DosavadnûÙ péûÙmûˋ metody zaloéƒenûˋ na silovû§ch téûÙdiáûÙch ái separûÀtorech ovéÀem narûÀéƒûÙ na svûˋ limity. StavebnûÙ a demoliánûÙ odpad je kvé₤li tomu zpravidla péeduráen k devalvujûÙcûÙm aplikacûÙm nebo dokonce k uloéƒenûÙ na sklûÀdku. NûÀéÀ péûÙspávek rozdálujeme na dvá áûÀsti. PrvnûÙ áûÀst péinûÀéÀûÙ fakta o produkci stavebnûÙho a demoliánûÙho odpadu v EU a zdé₤vodéuje urgenci v hospodûÀrnûˋm naklûÀdûÀnûÙ s nûÙm. DûÀle rekapituluje vû§voj nepéûÙmû§ch metod klasifikace. Struáná popisuje druh vhodnû§ch áidel pro sledovûÀnûÙ odpadu a algoritmy, kterûˋ tato data vyhodnocujûÙ. DruhûÀ áûÀst péinûÀéÀûÙ popis vlastnûÙho éeéÀenûÙ klasifikace, kterûˋ bylo vyvinuto na fakultûÀch stavebnûÙ a elektrotechnickûˋ áVUT v Praze. Metoda se opûÙrûÀ o hodnocenûÙ obrazovû§ch dat, kterûÀ jsou zûÙskûÀvûÀna pomocûÙ báéƒnû§ch RBG kamer.

1. ûvod
V krûÀtkosti zrekapitulujme prvnûÙ áûÀst naéÀeho péûÙspávku. V nûÙ jsme shrnuli data, kterûÀ v oblasti produkce ve stavebnictvûÙ publikuje Evropskû§ statistickû§ û¤éad Eurostat. Z uvedenû§ch informacûÙ je zéejmûˋ, éƒe aéƒ na malûˋ odchylky stavebnictvûÙ v poslednûÙch deseti letech stûÀle roste a s tûÙm zvyéÀuje i ekonomickû§ péûÙnos, ze kterûˋho táéƒûÙ celûÀ EU. Jenéƒe tento kû§éƒenû§ ré₤st je doprovûÀzen aéƒ neudréƒitelnou spotéebou surovin a produkcûÙ stavebnûÙho a demoliánûÙho odpadu (SDO).
Zmiéovanû§ trend se pokouéÀûÙ mûÙrnit evropskûÀ legislativa, kterûÀ naéizuje zefektivnit recyklaci nejen SDO, áûÙméƒ sleduje dva klûÙáovûˋ cûÙle: (i) redukovat, ái v nákterû§ch velmi odvûÀéƒnû§ch plûÀnech zcela eliminovat mnoéƒstvûÙ SDO uklûÀdanûˋho na sklûÀdku a uleháit tak éƒivotnûÙmu prostéedûÙ a (ii) zvû§éÀenûÙm efektivity péi naklûÀdûÀnûÙ s támito odpady snûÙéƒit materiûÀlovou nûÀroánost panenskû§ch surovin.

Tyto ambice ovéÀem nelze realizovat bez û¤áasti vády a techniky. V oblasti téûÙdánûÙ a naklûÀdûÀnûÙ se SDO vyvstûÀvûÀ mnoho komplikacûÙ technickûˋho charakteru, kterûˋ je nutnûˋ pro dosaéƒenûÙ vytyáenû§ch cûÙlé₤ postupná zdolûÀvat. Mezi ná patéûÙ i automatickûÀ klasifikace (rozpoznûÀnûÙ a uráenûÙ) fragmenté₤ SDO ve smásnû§ch stavebnûÙch sutûÙch. JednûÀ se o velmi heterogennûÙ smási, ve kterû§ch se báéƒná vyskytujûÙ beton, keramika, sûÀdrokarton, déevo (váetná materiûÀlé₤ na bûÀzi déeva), tepelnûˋ a akustickûˋ izolace, zeminy, asfaltovûˋ materiûÀly atd. [1]. Jednotlivûˋ fragmenty majûÙ ré₤znûˋ geometrickûˋ vlastnosti a áasto jsou kontaminovûÀny neáistotami jak anorganickûˋho, tak i organickûˋho pé₤vodu.
Je zéejmûˋ, éƒe zpátnûˋmu vyuéƒitûÙ sutûÙ musûÙ péedchûÀzet peálivûˋ roztéûÙdánûÙ a tomu zase péesnûÀ klasifikace jednotlivû§ch materiûÀlu. V prvnûÙ áûÀsti álûÀnku jsme uvedli moéƒnosti téûÙdánûÙ a struáná zrekapitulovali nákolik desûÙtek let starû§ vû§voj, kterû§ mûÀ koéeny ve téûÙdánûÙ smásnû§ch komunûÀlnûÙch odpadé₤. DûÀle se budeme vánovat pouze nepéûÙmû§m obrazovû§m metodûÀm klasifikace, jejichéƒ vû§zkumu a rozéÀûÙéenûÙ do praxe se vánujeme.
2. Obrazovûˋ metody pro klasifikaci SDO
2.1 Hardware
V rûÀmci evropskûˋho projektu RECONMATIC [2] na fakultûÀch stavebnûÙ a elektrotechnickûˋ áVUT v Praze vyvûÙjûÙme modely strojovûˋho uáenûÙ, kterûˋ jsou schopny pomocûÙ algoritmé₤ poáûÙtaáovûˋho vidánûÙ sledovat a na zûÀkladá multikriteriûÀlnûÙch definic klasifikovat fragmenty odpadu ve smásnû§ch sutûÙch.
Obrazovûˋ metody jsou zaloéƒeny na hodnocenûÙ obrazovû§ch dat, kterûÀ jsou zûÙskûÀvûÀna pomocûÙ báéƒnû§ch RGB kamer. V tom spoáûÙvûÀ jejich prvnûÙ podstatnûÀ vû§hoda; kamery jsou levnûˋ jak na poéûÙzenûÙ, tak i na provoz. DaléÀûÙ vû§hodou je, éƒe dûÙky svûˋmu ploéÀnûˋmu snûÙmûÀnûÙ (péi zachovûÀnûÙ kvalitnûÙho rozliéÀenûÙ) aéƒ nákolika tisûÙc cm2 mohou v reûÀlnûˋm áase hodnotit nákolik materiûÀlé₤ souáasná. PodmûÙnkou je pouze jejich péûÙmûÀ viditelnost. NavûÙc pokud je souáasná pouéƒito vûÙce kamer ve vhodnûˋ konfiguraci, lze uplatnit principy stereoskopickûˋho snûÙmûÀnûÙ a pracovat tak nejen v rovinnûˋm poli, ale i s hloubkovû§mi mapami. Kamery kromá materiûÀlovûˋ klasifikace dokûÀéƒûÙ kvantifikovat zastoupenûÙ jednotlivû§ch materiûÀlé₤ ve smási i v rûÀmci jednoho heterogennûÙho vzorku. Pokud jde o kvantitu souáasná zpracovûÀvanû§ch dat, limitujûÙcûÙm faktorem je spûÙéÀe vû§poáetnûÙ technika.
Mezi nevû§hody patéûÙ péedevéÀûÙm citlivost na áistotu optickû§ch álené₤ kamer. áoáky objektivu nesmûÙ bû§t zneáiéÀtány ái poéÀkozeny. Uvádomujeme si, éƒe zajistit áistotu prostéedûÙ v praéÀnû§ch téûÙdûÙrnûÀch SDO je prakticky nemoéƒnûˋ. Proto je nutnûˋ optiku éÀetrnû§mi zpé₤soby áistit (napé. automatickû§m ostéikem stlaáenûˋho vzduchu). DaléÀûÙ nevû§hodou je zûÀvislost na konstantnûÙch svátelnû§ch podmûÙnkûÀch. Jak si nûÙéƒe vysvátlûÙme, mezi hlavnûÙ, ovéÀem nikoliv jedinûÀ kritûˋria klasifikace materiûÀlé₤ patéûÙ hodnocenûÙ intenzity konkrûˋtnûÙ barvy povrchu sledovanûˋho vzorku. Jak znûÀmo, barvu péedmátu uráujûÙ péedevéÀûÙm fyzikûÀlnûÙ vlastnosti povrchu, ale tûˋéƒ svátlo, kterûˋ na ná dopadûÀ. Z tohoto dé₤vodu je nutnûˋ operovat za definovanû§ch svátelnû§ch podmûÙnek, kterû§ch lze nejlûˋpe dosûÀhnout umálû§m osvátlenûÙm [3], [4].
2.2 Software
Z informacûÙ, kterûˋ jsou zûÙskûÀny pomocûÙ RGB kamer, je sestaven vektor charakteristik. EfektivnûÙ vyuéƒitûÙ multimodûÀlnûÙch informacûÙ v klasifikaánûÙ û¤loze totiéƒ vyéƒaduje nejen jejich sbár z ré₤znû§ch senzoré₤, ale takûˋ nûÀslednûˋ logickûˋ sluáovûÀnûÙ. Samotnû§ proces fû¤ze kombinuje informace z jednotlivû§ch senzoré₤ za vyuéƒitûÙ unikûÀtnûÙch parametré₤ typickû§ch pro kaéƒdû§ analyzovanû§ vzorek. TûÙmto péûÙstupem jsou eliminovûÀny nepéesnosti a informaánûÙ mezery. InformaánûÙ vektory jsou nûÀsledná podrobeny klasifikûÀtoré₤m, coéƒ jsou v naéÀem péûÙpadá algoritmy rozhodovacûÙch stromé₤ (Decision Trees, DT) s gradientnûÙm posilovûÀnûÙm (Gradient Boosting, GB) a vûÙcevrstvû§mi perceptrony (Multilayer Perceptron, MP) a konvoluánûÙ neuronovûˋ sûÙtá (Convolutional neural networks, CNNs). Proces hodnocenûÙ je obdobnû§ tomu, jak by materiûÀly vizuûÀlná uráoval sûÀm álovák na zûÀkladá znalostûÙ a zkuéÀenostûÙ, kterûˋ mûÀ. PodrobnájéÀûÙmu popisu klasifikûÀtoré₤ je vánovûÀna kapitola 4.2.
3. Hodnocenûˋ materiûÀly
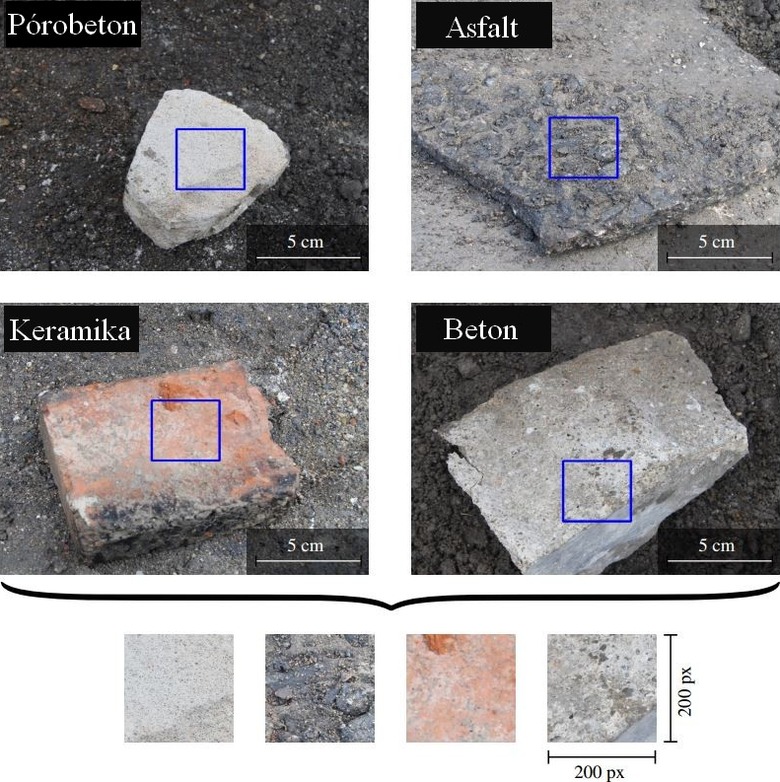
PrvotnûÙ experimenty jsme provûÀdáli na átyéech báéƒnû§ch materiûÀlech, kterûˋ jsou typickûˋ pro stavebnûÙ suti:
- autoklûÀvovanû§ pû°robeton,
- fragmenty asfaltovû§ch smásûÙ,
- stavebnûÙ keramika (stéeéÀnûÙ taéÀky, pûÀlenûˋ cihly a cihelnûˋ bloky)
- a fragmenty báéƒnûˋho hutnûˋho betonu.
Ré₤znûˋ vzorky o rozmárech od cca 30 do 250 mm byly foceny pomocûÙ DSLR fotoaparûÀté₤. RozliéÀenûÙ kaéƒdûˋho snûÙmku bylo 1920û1280 px. Vzorky byly fotografovûÀny za dennûÙho svátla (ve stûÙnu) v téûÙdûÙrná SDO v Kladná. Vzorky péed fotografovûÀnûÙm nebyly nijak upravovûÀny ani áiéÀtány, aby byla zachovûÀna autenticita reûÀlnû§ch podmûÙnek, viz ObrûÀzek 1. Za zmûÙnku stojûÙ, éƒe doposud publikovanûˋ studie, kterûˋ se vánovaly podobnû§m tûˋmaté₤m, pracovaly véƒdy s áistû§mi vzorky, coéƒ ovéÀem omezuje uplatnitelnost automatickû§ch procesé₤ klasifikace v praxi [5], [6].

ObrûÀzek 1: Modelovûˋ fotografie vzorké₤ pro vû§zkum klasifikaánûÙch technik
4. Procesy zpracovûÀnûÙ a klasifikace dat
4.1 Konvoluce versus extrakce vybranû§ch funkcûÙ
PoéûÙzeno bylo celkem vûÙce neéƒ 4000 fotografiûÙ ré₤znû§ch vzorké₤. Tyto snûÙmky byly nejprve manuûÀlná roztéûÙdány do materiûÀlovû§ch téûÙd (Pû°robeton, Asfalt, Keramika, Beton). Asfaltem rozumûÙme asfaltovûˋ smási, resp. materiûÀl oznaáovanû§ jako znovuzûÙskanûÀ asfaltovûÀ smás. V péûÙpadá keramiky se jednûÀ o cihly a stéeéÀnûÙ taéÀky. Z kaéƒdûˋ téûÙdy bylo nûÀsledná 80 % snûÙmku pouéƒito pro trûˋnovacûÙ a zbû§vajûÙcûÙch 20 % pro testovacûÙ sadu. Vzhledem k tomu, éƒe klasifikaánûÙ modely inklinujûÙ k uáenûÙ se rozpoznûÀvat materiûÀl dle jeho tvaru (obrysu), bylo nutnûˋ z kaéƒdûˋho snûÙmku vyjmout region 200û200 px, kterû§ obsahoval pouze informace o barvá a textuée povrchu, nikoliv o vzorku samotnûˋm, viz ObrûÀzek 2.
ObrûÀzek 2: ManuûÀlnûÙ extrakce vû§éezé₤ 200û200 px z fotografiûÙ pro trûˋnovacûÙ a testovacûÙ sadu vybranû§ch klasifikûÀtoré₤
4.2 Metriky
Kaéƒdû§ vû§éez z fotografie obsahuje téi dimenze informacûÙ. Dvá dimenze geometrickûˋ (osy i, j) a jednu dimenzi uráujûÙcûÙ intenzitu odrazivosti jednotlivû§ch barevnû§ch kanûÀlé₤ (RGB). Pro charakterizaci barvy a textury povrché₤ byly vybrûÀny nûÀsledujûÙcûÙ metriky:
StéednûÙ intenzita
StéednûÙ intenzita (nebo tûˋéƒ stéednûÙ intenzita éÀedûˋ barvy) ![]() je zûÀkladnûÙ veliáina, kterûÀ uráuje zastoupenûÙ éÀedûˋ (ve fotografii zûÀkladnûÙ) barvy sledovanûˋho vzorku za konstantnûÙch podmûÙnek osvátlenûÙ a parametré₤ expozice. Jakmile jsou za táchto okolnostûÙ snûÙmûÀny ré₤znûˋ vzorky SDO, je zéejmá, éƒe fotografie ré₤znû§ch materiûÀlé₤ bude obsahovat ré₤znûˋ mnoéƒstvûÙ éÀedûˋ barvy (pomáéme napé. bûÙlû§ pû°robeton a tûˋmáé áernû§ asfalt). Samozéejmá se jednûÀ o veliáinu, kterou nelze pouéƒûÙt jinak neéƒ pro velmi hrubûˋ téûÙdánûÙ materiûÀlu, protoéƒe neumûÙ éûÙct vûÙc, neéƒ jestli je hodnocenû§ vzorek tmavû§ nebo svátlû§. Pro hrubou klasifikaci, na nûÙéƒ nûÀsledná navazuje daléÀûÙ hodnocenûÙ, to ovéÀem podstatnûˋ je. Jak jiéƒ bylo éeáeno, stéednûÙ intenzita éÀedûˋ barvy je pré₤márem dûÙláûÙch intenzit éÀedûˋ barvy, kterûˋ jsou charakteristickûˋ pro jeden pixel. Matematicky lze tento vztah formulovat jako:
je zûÀkladnûÙ veliáina, kterûÀ uráuje zastoupenûÙ éÀedûˋ (ve fotografii zûÀkladnûÙ) barvy sledovanûˋho vzorku za konstantnûÙch podmûÙnek osvátlenûÙ a parametré₤ expozice. Jakmile jsou za táchto okolnostûÙ snûÙmûÀny ré₤znûˋ vzorky SDO, je zéejmá, éƒe fotografie ré₤znû§ch materiûÀlé₤ bude obsahovat ré₤znûˋ mnoéƒstvûÙ éÀedûˋ barvy (pomáéme napé. bûÙlû§ pû°robeton a tûˋmáé áernû§ asfalt). Samozéejmá se jednûÀ o veliáinu, kterou nelze pouéƒûÙt jinak neéƒ pro velmi hrubûˋ téûÙdánûÙ materiûÀlu, protoéƒe neumûÙ éûÙct vûÙc, neéƒ jestli je hodnocenû§ vzorek tmavû§ nebo svátlû§. Pro hrubou klasifikaci, na nûÙéƒ nûÀsledná navazuje daléÀûÙ hodnocenûÙ, to ovéÀem podstatnûˋ je. Jak jiéƒ bylo éeáeno, stéednûÙ intenzita éÀedûˋ barvy je pré₤márem dûÙláûÙch intenzit éÀedûˋ barvy, kterûˋ jsou charakteristickûˋ pro jeden pixel. Matematicky lze tento vztah formulovat jako:
 (1)
(1)
kde je
- i a j
- souéadnice konkrûˋtnûÙho pixelu,
- N
- jejich poáet v éadá
- Igray
- intenzita éÀedûˋ barvy konkrûˋtnûÙho pixelu.
StéednûÙ intenzita vybranûˋho kanûÀlu barvy
StéednûÙ intenzita vybranûˋho kanûÀlu barvy ![]() popisuje pomárnûˋ zastoupenûÙ jednûˋ konkrûˋtnûÙ barvy ve snûÙmku. I zde péipomûÙnûÀme nutnost konstantnûÙch svátelnû§ch podmûÙnek, ovéÀem jiéƒ nikoliv bezpodmûÙneáná. V naéÀem péûÙpadá jsme zvolili stéednûÙ intenzitu áervenûˋ barvy, protoéƒe tento parametr dokûÀéƒe velice spolehlivá rozpoznat keramickûˋ vzorky a velkou vahou tak péispát do klasifikaánûÙho éetázce. Mnoho doposud publikovanû§ch klasifikaánûÙch modelé₤ svûˋ hodnocenûÙ opûÙrûÀ pouze o hodnocenûÙ barev [5]. StéednûÙ intenzita áervenûˋ barvy popisuje zastoupenûÙ áervenûˋho kanûÀlu napéûÙá snûÙmkem v pomáru ke stéednûÙ éÀedûˋ barvá. Matematickû§ zûÀpis je nûÀsledujûÙcûÙ:
popisuje pomárnûˋ zastoupenûÙ jednûˋ konkrûˋtnûÙ barvy ve snûÙmku. I zde péipomûÙnûÀme nutnost konstantnûÙch svátelnû§ch podmûÙnek, ovéÀem jiéƒ nikoliv bezpodmûÙneáná. V naéÀem péûÙpadá jsme zvolili stéednûÙ intenzitu áervenûˋ barvy, protoéƒe tento parametr dokûÀéƒe velice spolehlivá rozpoznat keramickûˋ vzorky a velkou vahou tak péispát do klasifikaánûÙho éetázce. Mnoho doposud publikovanû§ch klasifikaánûÙch modelé₤ svûˋ hodnocenûÙ opûÙrûÀ pouze o hodnocenûÙ barev [5]. StéednûÙ intenzita áervenûˋ barvy popisuje zastoupenûÙ áervenûˋho kanûÀlu napéûÙá snûÙmkem v pomáru ke stéednûÙ éÀedûˋ barvá. Matematickû§ zûÀpis je nûÀsledujûÙcûÙ:
 (2)
(2)
kde Ired je intenzita áervenûˋ barvy konkrûˋtnûÙho pixelu a ostatnûÙ veliáiny jsou shodnûˋ s támi v rovnici á. (1).
Shannonova entropie
Shannonova entropie H vû§raznû§m zpé₤sobem posouvûÀ péesnost vû§éÀe uvedenûˋho hodnocenûÙ zaloéƒenûˋho pouze na barvûÀch. SoustéedûÙ se totiéƒ na popis textury povrchu, péesnáji éeáeno na nûÀhodnost povrchovûˋho vzoru hodnocenûˋho materiûÀlu [7]. Tento péûÙstup péirozená uplatéuje i álovák, kterû§ vizuûÀlná poznûÀvûÀ materiûÀl, ovéÀem s tûÙm rozdûÙlem, éƒe ré₤znou texturu povrchu hodnotûÙ subjektivná a na zûÀkladá svû§ch zkuéÀenostûÙ, aniéƒ by k tomu pouéƒûÙval exaktnûÙ matematickûˋ vztahy (texturu povrchu asfaltovûˋ smási napé. od keramickûˋ taéÀky dokûÀéƒe rozpoznat, aniéƒ by musel souáasná znûÀt barvu vzorku). Shannonova entropie byla definovûÀna jiéƒ na konci 40. let minulûˋho stoletûÙ a postupná se zaáala uplatéovat i péi klasifikaci materiûÀlé₤ [8], [9]. JejûÙ matematickû§ zûÀpis je nûÀsledujûÙcûÙ:
 (3)
(3)
kde ![]() (pro 8bitovûˋ snûÙmky) je frekvence intenzity éÀedû§ch pixelé₤ a ostatnûÙ veliáiny jsou shodná s támi v rovnici á. (1). Dopléme, éƒe vysokûÀ hodnota H znaáûÙ vysokou nûÀhodnost signûÀlu, tedy textury povrchu vzorku.
(pro 8bitovûˋ snûÙmky) je frekvence intenzity éÀedû§ch pixelé₤ a ostatnûÙ veliáiny jsou shodná s támi v rovnici á. (1). Dopléme, éƒe vysokûÀ hodnota H znaáûÙ vysokou nûÀhodnost signûÀlu, tedy textury povrchu vzorku.
StéednûÙ gradient intenzity
PoslednûÙm parametrem je stéednûÙ gradient intenzity ![]() , kterû§ indikuje kvalitu stochastickûˋho vzoru ve vztahu k máéenûÙ v digitûÀlná obrazovûˋ korelaci [10]. HodnotûÙ frekvenci a intenzitu nepravidelnostûÙ v ploéÀe snûÙmku (v naéÀem péûÙpadá povrchu vzorku). PéûÙmo souvisûÙ s hrubostûÙ textury a mûÀ podobnou vypovûÙdajûÙcûÙ hodnotu jako Shannonova entropie [11]. V rûÀmci naéÀûÙ studie byl stéednûÙ gradient intenzity poáûÙtûÀn nûÀsledovná:
, kterû§ indikuje kvalitu stochastickûˋho vzoru ve vztahu k máéenûÙ v digitûÀlná obrazovûˋ korelaci [10]. HodnotûÙ frekvenci a intenzitu nepravidelnostûÙ v ploéÀe snûÙmku (v naéÀem péûÙpadá povrchu vzorku). PéûÙmo souvisûÙ s hrubostûÙ textury a mûÀ podobnou vypovûÙdajûÙcûÙ hodnotu jako Shannonova entropie [11]. V rûÀmci naéÀûÙ studie byl stéednûÙ gradient intenzity poáûÙtûÀn nûÀsledovná:
 (4)
(4)
kde ![]() je modul lokûÀlnûÙ intenzity gradientu, Ii a Ij jsou odvozeniny Igray (i, j) ve smyslu smáré₤ i a j v kaéƒdûˋ pozici pixelu.
je modul lokûÀlnûÙ intenzity gradientu, Ii a Ij jsou odvozeniny Igray (i, j) ve smyslu smáré₤ i a j v kaéƒdûˋ pozici pixelu.
4.3 KlasifikûÀtory
Jakmile jsou zûÙskûÀna a charakterizovûÀna obrazovûÀ data, na éadu musûÙ péijûÙt vû§poáetnûÙ modely, kterûˋ je roztéûÙdûÙ a ke kaéƒdûˋmu vzorku péiéadûÙ predikci konkrûˋtnûÙho materiûÀlu. Vû§sledkem je klasifikace s péiéazenou mûÙrou péesnosti. Jednotlivûˋ klasifikaánûÙ algoritmy jsou struáná popsûÀny nûÙéƒe.
GradientnûÙ posilovûÀnûÙ
GradientnûÙ posilovûÀnûÙ je algoritmus strojovûˋho uáenûÙ, kterû§ je velmi rozéÀûÙéen péedevéÀûÙm pro svoji efektivitu a spolehlivost. Typicky vyuéƒûÙvûÀ princip rozhodovacûÙch stromé₤ (decision trees). Ty jsou v podstatá tvoéeny vû§vojovû§m diagramem, ve kterûˋm se na kaéƒdûˋm internûÙm uzlu iterativná testuje sada atributé₤ (viz metriky vû§éÀe). Pakliéƒe dojde k nûÀlezu shody mezi sledovanou veliáinou a veliáinou uloéƒenou v databûÀzi, testovanû§ vzorek dostûÀvûÀ éÀtûÙtek s materiûÀlovou charakteristikou, na zûÀkladá nûÙéƒ je klasifikovûÀn [12].
VûÙceû¤rovéovûÀ percepce
VûÙceû¤rovéovûÀ percepce je umálûÀ neuronovûÀ sûÙéË, kterûÀ sestûÀvûÀ ze vstupnûÙ û¤rovná, specifickûˋho poátu skrytû§ch û¤rovnûÙ a vû§stupnûÙ û¤rovná. VstupnûÙ û¤roveé péedstavuje vlastnosti vstupnûÙch dat, zatûÙmco ta vû§stupnûÙ péedpovûÙdûÀ pravdápodobnost zatéûÙdánûÙ. Skrytûˋ û¤rovná jsou pak vyuéƒity pro uáenûÙ se nelineûÀrnûÙ transformace vstupnûÙch parametré₤, kterûˋ vedou k finûÀlnûÙ predikci, tedy péedpovádi, o jakû§ materiûÀl se jednûÀ [13].
KonvoluánûÙ neuronovûÀ sûÙéË
KonvoluánûÙ neuronovûÀ sûÙéË je typ umálûˋ neuronovûˋ sûÙtá, kterûÀ je navréƒena pro analû§zu dat méûÙéƒkovou strukturou. Tato sûÙéË obsahuje nákolik vrstev (konvoluánûÙ, sdruéƒovacûÙ, propojenûˋ). NarozdûÙl od GB a MLP klasifikûÀtoré₤ CNN vyuéƒûÙvûÀ fotografii jako vstup, nikoliv extrahovanûˋ parametry. SamotnûÀ konvoluánûÙ operace pak spoáûÙvûÀ v tom, éƒe konvoluánûÙ jûÀdro postupná putuje napéûÙá obrûÀzkem po vytyáenûˋm rastru a krok za krokem hodnotûÙ parametry v danûˋ pozici. KonvoluánûÙ vrstvu nûÀsleduje aktivaánûÙ funkce, kterûÀ aplikuje nelineûÀrnûÙ transformaci do vû§stupnûÙ konvoluce. Plná propojenûˋ vrstvy pak kombinujûÙ vlastnosti nauáenûˋ konvoluánûÙmi a propojovacûÙmi vrstvami a na zûÀkladá toho vytvûÀéûÙ finûÀlnûÙ materiûÀlovou predikci [14], [15].
V naéÀem péûÙpadá jsme pouéƒili sûÙéË se téemi konvoluánûÙmi vrstvami. PrvnûÙ a téetûÙ vrstva obsahovaly 32 3û3 filtré₤ a totûˋéƒ mnoéƒstvûÙ aktivaánûÙch funkcûÙ. DruhûÀ vrstva obsahovala 64 3û3 filtré₤ a aktivaánûÙch funkcûÙ.
Péi trûˋnovacûÙm procesu bylo dosaéƒeno 100% péesnosti materiûÀlovûˋ klasifikace na trûˋninkovû§ch datech po 30 cyklech. OvéÀem nejvyéÀéÀûÙ péesnosti na testovacûÙch datech, kterûÀ lehce péekonala 80 %, bylo dosaéƒeno po 11 cyklech, potûˋ dochûÀzelo k tzv. overfittingu. Pro materiûÀlovou klasifikaci byl proto pouéƒit model trûˋnovanû§ch na 11 cyklech.
5. Vû§sledky a diskuse
Vû§sledky jednotlivû§ch klasifikûÀtoré₤ shrnuje ObrûÀzek 3. Z náj je patrnûˋ, éƒe nejpéesnáji klasifikovanû§m materiûÀlem byla keramika. VéÀechny téi klasifikûÀtory ji dokûÀzaly uráit s mûÙrou péesnosti pées 96 % a zûÀroveé ostatnûÙ materiûÀly chybná oznaáily za keramiku pouze v nûÙzkû§ch jednotkûÀch procent. Takto péûÙznivû§ vû§sledek lze péisuzovat velkûˋmu mnoéƒstvûÙ áervenûˋ barvy, kterûÀ je pro danû§ materiûÀl typickûÀ a áûÙm se odliéÀuje od trojice daléÀûÙch hodnocenû§ch vzorké₤. Tato skuteánost potvrzuje, éƒe i pouhûˋ hodnocenûÙ odstûÙnu barev bez zamáéenûÙ na texturu povrchu, mûÀ péi klasifikaánûÙch û¤lohûÀch podstatnû§ vû§znam. Samozéejmá je nutnûˋ mûÙt na památi, éƒe i keramika mé₤éƒe mûÙt jinou barvu neéƒ áervenou. V takovûˋm péûÙpadá je nutnûˋ péi klasifikaánûÙch procesech spolûˋhat na ostatnûÙ metriky.
Druhû§m nejpéesnáji hodnocenû§m materiûÀlem byly vzorky asfaltovûˋ smási. MûÙra péesnosti se v péûÙpadá gradientnûÙho posilovûÀnûÙ dréƒela na hranici 88 %, zatûÙmco vûÙceû¤rovéovûÀ percepce a konvoluánûÙ neuronovûÀ sûÙéË tento materiûÀl hodnotily s péesnostûÙ lehce pées 90 %. V tomto péûÙpadá dochûÀzelo nejáastáji k zûÀmáná s betonem, a to aéƒ v 8,4 % péûÙpadé₤.
Pro véÀechny téi klasifikûÀtory bylo obtûÙéƒnûˋ rozliéÀit beton od pû°robetonu. K jejich zûÀmáná dochûÀzelo aéƒ ve vûÙce neéƒ 20 % péûÙpadé₤. Dé₤vodem je velmi podobnûÀ barva a textura povrché₤, zejmûˋna pokud byl vzorek hutnûˋho betonu vyroben z jemnozrnnûˋho kameniva. MûÙra péesnosti se pohybovala na neuspokojivû§ch 68 aéƒ 80 %. V tomto péûÙpadá je zéejmûˋ, éƒe obrazovûˋ metody bude nutnûˋ rozéÀûÙéit o daléÀûÙ typy senzoré₤, kterûˋ se opûÙrajûÙ o jinû§ fyzikûÀlnûÙ princip, neéƒ o hodnocenûÙ viditelnû§ch spekter svátla.
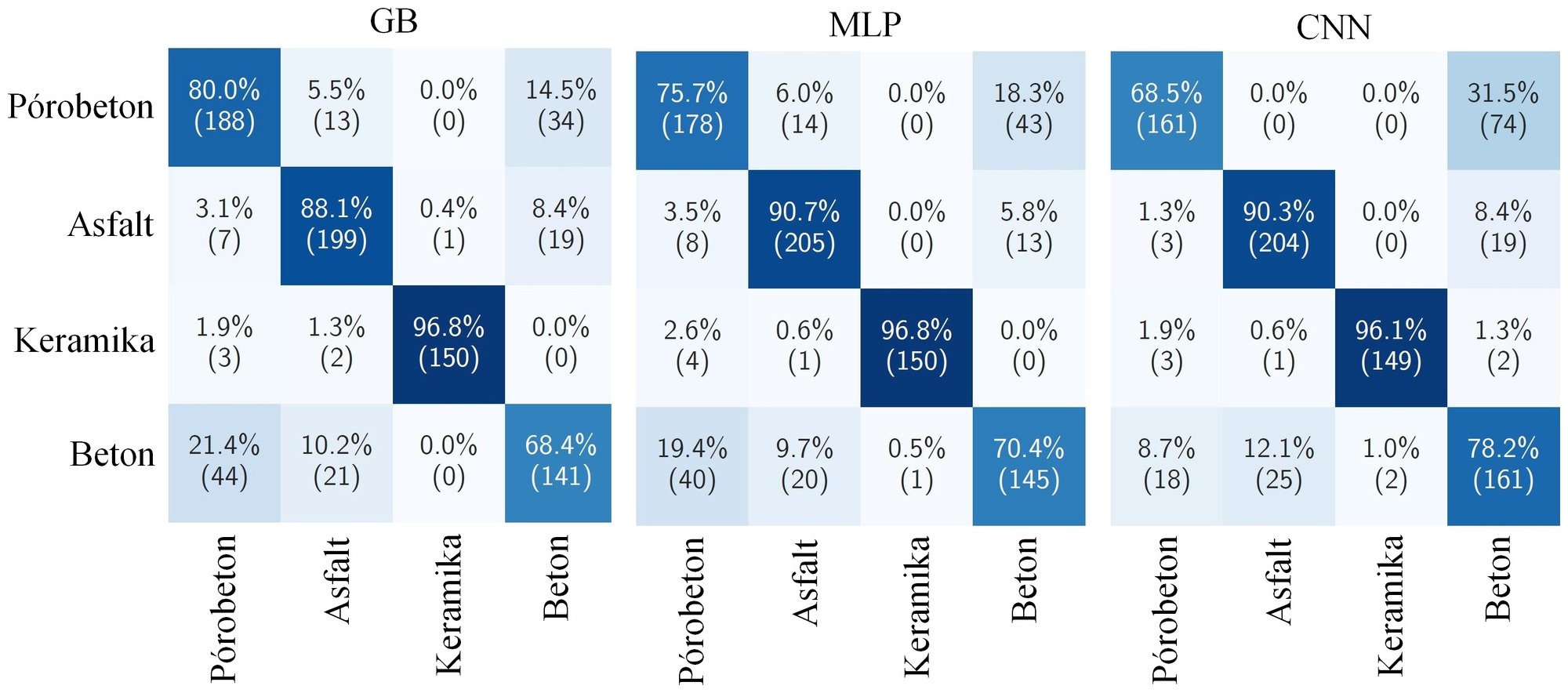
ObrûÀzek 3: Matice ukazujûÙcûÙ mûÙru péesnosti klasifikace v zûÀvislosti na typu klasifikûÀtoru a druhu hodnocenûˋho materiûÀlu
PodûÙvûÀme-li se na vû§sledky obdobnûˋho vû§zkumu od jinû§ch autoré₤, zjistûÙme, éƒe mûÙra péesnosti péi klasifikaánûÙch û¤lohûÀch áasto atakovala 100 %. NapéûÙklad Davis a kol. [16] testoval CNN klasifikûÀtor na komunûÀlnûÙch odpadech (papûÙr, sklo, plasty, kovy, lepenka a nerecyklovatelnûˋ materiûÀly). Dostal se na mûÙru péenosnosti bezmûÀla 96 %. Je ale nutnûˋ zmûÙnit, éƒe uvedenûˋ materiûÀly majûÙ vûÙce rozdûÙlé₤ v charakteristikûÀch povrché₤ neéƒ SDO.
Vû§raznûˋmu posunu dosûÀhl Xiao a kol. [17], kterû§ klasifikoval SDO na zûÀkladá dat z hyperspektrûÀlnûÙch kamer. V péûÙpadá rozpoznûÀvûÀnûÙ plasté₤, keramickû§ch cihel, betonu a déeva dosûÀhl absolutnûÙ péesnosti.
6. ZûÀvár a daléÀûÙ potenciûÀl nepéûÙmû§ch klasifikaánûÙch metod
NaéÀe zûÀváry a aktuûÀlnûÙ vádeckûˋ poznatky daléÀûÙch autorskû§ch kolektivé₤ ukazujûÙ, éƒe pomocûÙ áistá obrazovû§ch metod lze v oblasti SDO dosûÀhnout péesnosti klasifikace báéƒná 80 aéƒ 90 %. Jejich sofistikovanû§m cizelovûÀnûÙm je moéƒnûˋ zûÙskat nákolik daléÀûÙch jednotek procent, áasto ovéÀem za cenu neefektivnûÙho péûÙstupu (vysokûˋ vû§poáetnûÙ nûÀroky, pomalûˋ zûÙskûÀvûÀnûÙ vstupnûÙch dat, obtûÙéƒná dosaéƒitelnûˋ okolnûÙ podmûÙnky). DaléÀûÙho posunu lze dosûÀhnout integracûÙ ré₤znû§ch jinû§ch typé₤ senzoré₤, kterûˋ umoéƒéujûÙ bezkontaktnûÙ máéenûÙ. Vedle RGB kamer se mohou instalovat napéûÙklad hyperspektrûÀlnûÙ kamery, kterûˋ jsou citlivûˋ na eletkromagnetickûˋ zûÀéenûÙ i dalece mimo viditelnûÀ spektra. Vhodnou alternativou se tûˋéƒ zdajûÙ bû§t ultrazvukovûˋ senzory. Ty snûÙmajûÙ parametry ultrazvukovûˋho vlnánûÙ, kterûˋ se odrazilo o povrch hodnocenûˋho materiûÀlu. V û¤vahu samozéejmá péipadajûÙ i kontaktnûÙ áidla, napé. hmotnostnûÙ, ale to uéƒ se dostûÀvûÀme za rûÀmec tohoto péûÙspávku.
7. Literatura
- T. Pavlé₤ and J. PeéÀta, Katalog vû§robké₤ a materiûÀlé₤ s obsahem druhotnû§ch surovin z pré₤myslovû§ch provozé₤ a komunûÀlnûÙch odpadé₤ pro pouéƒitûÙ ve stavebnictvûÙ (2021) – Recyklujme stavby! áVUT v Praze, 2021.
- RECONMATIC, “Automated Solutions For Sustainable and Circular Construction and Demolition Waste Management”. Accessed: Aug. 20, 2024. [Online]. Available: https://www.reconmatic.eu/.
- J. Trejbal, V. Neéƒerka, and T. ZbûÙral, „StrojovûÀ revoluce péi téûÙdánûÙ SDO se blûÙéƒûÙ“, Odpadovûˋ fû°rum, vol. 3, pp. 34–35, 2024.
- T. ZbûÙral, V. Neéƒerka, J. Trejbal, M. HuéƒvûÀr, and S. VûÙtek, „Pokroáilûˋ zûÙskûÀvûÀnûÙ dataseté₤ pro péesnou klasifikaci stavebnûÙho a demoliánûÙho odpadu pomocûÙ strojovûˋho uáenûÙ“, in TVIP – Tû§den vû§zkumu a inovacûÙ pro praxi, konference Odpady ze a pro stavebnictvûÙ, Hustopeáe: áeskûˋ ekologickûˋ manaéƒerskûˋ centrum, z. s, 2023.
- H. Son, C. Kim, and C. Kim, “Automated Color Model–Based Concrete Detection in Construction-Site Images by Using Machine Learning Algorithms”, Journal of Computing in Civil Engineering, vol. 26, no. 3, pp. 421–433, May 2012,
https://doi.org/10.1061/(asce)cp.1943-5487.0000141. - A. Dimitrov and M. Golparvar-Fard, “Vision-based material recognition for automated monitoring of construction progress and generating building information modeling from unordered site image collections”, Advanced Engineering Informatics, vol. 28, no. 1, pp. 37–49, Jan. 2014, https://doi.org/10.1016/j.aei.2013.11.002.
- V. Neéƒerka and J. Trejbal, “Assessment of aggregate-bitumen coverage using entropy-based image segmentation”, Road Materials and Pavement Design, vol. 21, no. 8, pp. 2364–2375, Nov. 2020,
https://doi.org/10.1080/14680629.2019.1605304. - C. E. Shannon, “A Mathematical Theory of Communication PART III: MATHEMATICAL PRELIMINARIES”.
- J. AntoéÀ, V. Neéƒerka, and M. Somr, “ASSESSMENT OF 2D-DIC STOCHASTIC PATTERNS”, Acta Polytech CTU Proc, vol. 13, p. 1, Nov. 2017, https://doi.org/10.14311/app.2017.13.0001.
- B. Pan, Z. Lu, and H. Xie, “Mean intensity gradient: An effective global parameter for quality assessment of the speckle patterns used in digital image correlation”, Opt Lasers Eng, vol. 48, no. 4, pp. 469–477, Apr. 2010,
https://doi.org/10.1016/j.optlaseng.2009.08.010. - L. Yuan, J. Guo, and Q. Wang, “Automatic classification of common building materials from 3D terrestrial laser scan data”, Autom Constr, vol. 110, Feb. 2020, https://doi.org/10.1016/j.autcon.2019.103017.
- J. H. Friedman, “Stochastic gradient boosting”, 2002. [Online]. Available: www.elsevier.com/locate/csda
- G. E. Hinton and S. Osindero, “A Fast Learning Algorithm for Deep Belief Nets Yee-Whye Teh”, 2006.
- A. Krizhevsky, I. Sutskever, and G. E. Hinton, “ImageNet Classification with Deep Convolutional Neural Networks”. [Online]. Available: http://code.google.com/p/cuda-convnet/.
- S. Zhou, Q. Chen, and X. Wang, “Convolutional deep networks for visual data classification”, Neural Process Lett, vol. 38, no. 1, pp. 17–27, Aug. 2013, https://doi.org/10.1007/s11063-012-9260-y.
- P. Davis, F. Aziz, M. T. Newaz, W. Sher, and L. Simon, “The classification of construction waste material using a deep convolutional neural network”, Autom Constr, vol. 122, Feb. 2021, https://doi.org/10.1016/j.autcon.2020.103481.
- W. Xiao, J. Yang, H. Fang, J. Zhuang, and Y. Ku, “Development of online classification system for construction waste based on industrial camera and hyperspectral camera”, PLoS One, vol. 14, no. 1, Jan. 2019,
https://doi.org/10.1371/journal.pone.0208706.
PodákovûÀnûÙ
álûÀnek vznikl za péispánûÙ rûÀmcovûˋho programu Evropskûˋ unie Horizon Europe (vû§zva HORIZON-CL4-2021-TWIN-TRANSITION-01-11) na zûÀkladá grantovûˋ dohody á. ~101058580, projektu RECONMATIC (AutomatizovanûÀ éeéÀenûÙ pro udréƒitelnûˋ a obáhovûˋ hospodûÀéstvûÙ stavebnûÙch a demoliánûÙch odpadé₤). DûÀle dákujeme áVUT v Praze za poskytnutûÙ podpory v rûÀmci grantovûˋ dohody á. SGS24/003/OHK1/1T/11 (Aplikace novû§ch technologiûÙ pro zvû§éÀenûÙ udréƒitelnosti stavebnictvûÙ).
The efficient classification of materials in construction debris is crucial for their sorting and further valuable utilization. Current methods, whether relying on force sorters or separators, are reaching their limitations. In many cases, construction and demolition waste materials end up being downcycled or even sent to landfills. Our contribution is divided into two parts. The first part presents facts relating to the production of construction and demolition waste in the EU and justifies the urgency of responsible waste management. It also recaps the development of indirect methods of classification and briefly describes types of suitable sensors for material observation and algorithms for data evaluation. The second part describes our classification solution, developed by the faculties of civil engineering and electrical engineering at CTU in Prague. This method is based on the evaluation of data obtained with ordinary RGB cameras.