Vû§stuéƒ ploéÀnû§ch éƒelezobetû°novû§ch prvkov viazanûÀ robotmi
Zo véÀetkû§ch odvetvûÙ priemyslu je prûÀve ten stavebnû§ najmenej automatizovanû§. ZauéƒûÙvanûˋ spûÇsoby nûÀvrhu stavebnû§ch konéÀtrukciûÙ sû¤ prispûÇsobenûˋ tomuto faktu, áo platûÙ aj o samotnom nûÀvrhu betonûÀrskej vû§stuéƒe. Vû§stuéƒ ploéÀnû§ch prvkov, ako sû¤ stropnûˋ dosky alebo steny, je pritom dostatoáne jednoduchûÀ na to, aby jej vû§roba bola automatizovanûÀ, áûÙm je znûÙéƒenûÀ spotreba materiûÀlu a aj zvû§éÀenûÀ efektivita vyuéƒitia pracovnej sily. álûÀnok pojednûÀva princûÙp nûÀvrhu vû§stuéƒe viazanej robotom Perseus firmy XEUS – Civil Engineering Robotics s. r. o. vysvetlenom na vû§stuéƒi pri spodnom povrchu stropnej dosky obytnej budovy. Pri tvorbe metodiky nûÀvrhu takejto vû§stuéƒe sa klûÀdol dûÇraz na okaméƒitû¤ moéƒnoséË nasadenia do praxe, priáom si nûÀjde uplatnenie ako v zûÀvodoch na vû§robu prefabrikûÀtov, tak aj priamo na stavbe.
1. ûvod
S produkciou aéƒ 38 % celosvetovû§ch uhlûÙkovû§ch emisiûÙ [1] patrûÙ stavebnû§ priemysel medzi hlavnû§ objekt zûÀujmu v rûÀmci boja proti klimatickej zmene. V kontexte strategickej vûÙzie Eurû°pskej komisie pre dosiahnutie klimaticky neutrûÀlneho hospodûÀrstva do roku 2050, MedzinûÀrodnûÀ agentû¤ra pre energetiku (International Energy Agency, IEA) odhaduje, éƒe emisie priamo vyplû§vajû¤ce zo stavebnej áinnosti musia klesnû¤éË o 50 % do roku 2030. Podáƒa Nigela Toppinga, vysokûˋho predstaviteáƒa pre zachovanie klûÙmy na COP26, „MusûÙme prehodnotiéË vyuéƒitie betû°nu a ocele. To, ái sa uhlûÙkovo neutrûÀlna oceრa betû°n stanû¤ materiûÀlmi budû¤cnosti, bude zûÀvisieéË od skutoánosti, ako rû§chlo sa tieto odvetvia inovujû¤ tvûÀrou v tvûÀr novû§m a prevratnû§m technolû°giûÀm.“
V rozpore so zûÀmerom Eurû°pskej komisie, aktuûÀlna ekonomickûÀ situûÀcia v Eurû°pe a takisto aj na û¤zemûÙ Slovenskej republiky, vedie k zhoréÀeniu efektivity vyuéƒûÙvania materiûÀlov. Nedostatok kvalifikovanû§ch robotnûÙkov (viazaáov betonûÀrskej vû§stuéƒe) ako aj vysokûˋ nûÀroky na rû§chloséË vû§stavby zaprûÙáinili, éƒe sa realizûÀtori áastokrûÀt priklûÀéajû¤ k menej efektûÙvnym nûÀvrhom vystuéƒovania éƒelezobetû°novû§ch konéÀtrukciûÙ podáƒa tradiánû§ch postupov, s vysokou spotrebou materiûÀlov a so znaánû§mi prepravnû§mi vzdialenoséËami.
Vzháƒadom na fakt, éƒe automatizûÀcia ako takûÀ v tomto sektore stavebnûˋho priemyslu prakticky neexistuje, je nutnûˋ si stanoviéË rozumnûˋ a hlavne splniteáƒnûˋ ciele. Bolo teda prirodzenûˋ, éƒe pre tento û¤áel boli vybranûˋ takûˋ konéÀtrukánûˋ prvky, ktorûˋ sû¤, áo sa vystuéƒenia tû§ka, jednoduchûˋ. ZûÀroveé véÀak ich vystuéƒenie tvorûÙ najvûÊáéÀiu áaséË z celkovej vû§stuéƒe pouéƒitej v typickû§ch monolitickû§ch konéÀtrukciûÀch pozemnû§ch stavieb. Ide o 2D konéÀtrukánûˋ prvky. Konkrûˋtne o vû§stuéƒ, ktorûÀ mûÇéƒe byéË vyhotovenûÀ vo forme sietûÙ. Nejde véÀak o beéƒnûˋ, typizovanûˋ zvûÀranûˋ siete, ale o optimalizovanûˋ unikûÀtne siete.
2. Porovnanie zauéƒûÙvanû§ch spûÇsobov vystuéƒovania
PrûÙpadovûÀ éÀtû¤dia bola vykonanûÀ na jednom z veáƒkû§ch developerskû§ch projektov na okraji Bratislavy. KonéÀtrukánû§ systûˋm objektov tejto etapy developerskûˋho projektu,bol navrhnutû§ ako stenovû§, obojsmernû§. Samotnûˋ zvislûˋ, ako aj vodorovnûˋ nosnûˋ konéÀtrukcie boli vyhotovenûˋ z monolitickûˋho éƒelezobetû°nu. Vybranû§ objekt bol zvolenû§ ako prûÙpadovûÀ éÀtû¤dia kvûÇli tomu, éƒe realizaánû§ projekt bol vypracovanû§ s vû§stuéƒou vo viazanej forme. Po vysû¤éËaéƒenûÙ realizûÀcie si realizûÀtor na vlastnûˋ nûÀklady dal prepracovaéË vû§stuéƒ z viazanej formy na vû§stuéƒ zvûÀranû§mi sieéËami s prûÙloéƒkami.
V prvej alternatûÙve vystuéƒenia pomocou viazanej vû§stuéƒe bolo na jednom typickom podlaéƒûÙ navrhnutû§ch 6544 kg vû§stuéƒe v stropnej doske objeku a 5554 kg vû§stuéƒe v stenûÀch. Spolu 12 098 kg vû§stuéƒe.
V druhej alternatûÙve vystuéƒenie pomocou zvûÀranû§ch betonûÀrskych sietûÙ s prûÙloéƒkami bolo na jednom typickom podlaéƒûÙ pouéƒitû§ch 7807 kg vû§stuéƒe v stropnej doske a 6202 kg vû§stuéƒe v stenûÀch. Spolu 14 009 kg vû§stuéƒe.
Na typickom podlaéƒûÙ sa zvû§éÀila spotreba ocele o takmer 16 % (spracovanûˋ na zûÀklade [2]).
3. Vû§stuéƒ viazanûÀ robotmi
Aby si vû§stuéƒ viazanûÀ robotmi naéÀla uplatnenie v tak rigidnom priemyselnom odvetvûÙ, ako je ten stavebnû§, je nutnûˋ aby kombinovala vû§hody viazanej vû§stuéƒe s vû§hodami vystuéƒovania pomocou sietûÙ. ZûÀklad tejto vû§stuéƒe tvoria veáƒkoformûÀtovûˋ siete.
3.1 Koncept veáƒkoformûÀtovû§ch sietûÙ
VeáƒkoformûÀtovûˋ siete sû¤ najjednoduchéÀûÙm a zûÀroveé najefektûÙvnejéÀûÙm spûÇsobom navrhovania vû§stuéƒe ploéÀnû§ch éƒelezobetû°novû§ch prvkov viazanû§ch pomocou robotov. Presunom vû§roby sietûÙ priamo na stavenisko je moéƒnûˋ zvûÊáéÀiéË ich rozmer, ktorû§ uéƒ nebude obmedzovanû§ ich prepravou, áo zûÀroveé zmierni dopad na éƒivotnûˋ prostredie.
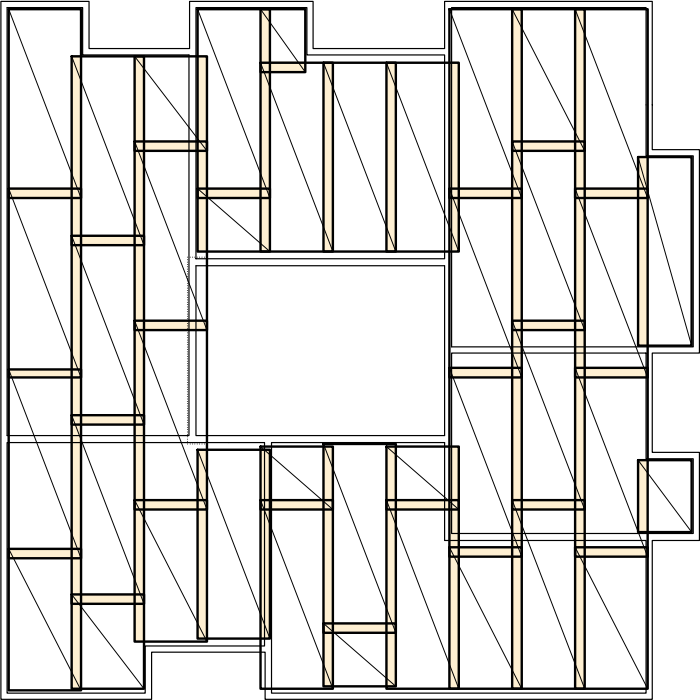
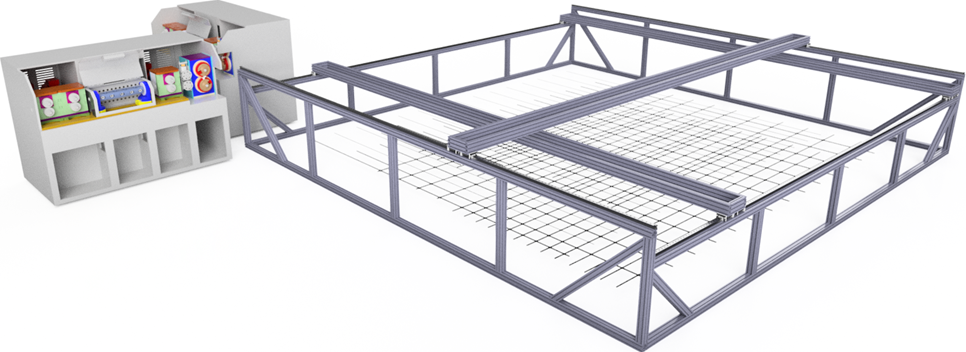
Obr. 1 ZvûÀranûˋ siete Q257 (6×2,3 m) pouéƒitûˋ v projekte (váƒavo) a veáƒkoformûÀtovûˋ siete 6×6 m (vpravo). é rafa reprezentuje prekryv.
Ako cieრbol stanovenû§ rozmer sietûÙ 6×6 metrov. Samotnûˋ siete sû¤ vyrûÀbanûˋ z kotû¤áov betonûÀrskej vû§stuéƒe. Vû§stuéƒ v kotû¤ái prechûÀdza cez tzv. vyrovnûÀvaáku betonûÀrskej vû§stuéƒe, ktorûÀ prû¤t odstrihne v presnej vzdialenosti a posunie do zûÀsobnûÙka. Keáéƒe prû¤ty vû§stuéƒe mûÇéƒu byéË variabilnej dá¤éƒky, je tak moéƒnûˋ vyhotoviéË siete atypickû§ch rozmerov a tvarov, ái sietûÙ s otvormi. Pri takto vyrobenû§ch sieéËach je prakticky eliminovanû§ odpad, ktorû§ vyplû§va z nutnosti rezania vopred zvûÀranû§ch sietûÙ.
Kontrolnû§ nûÀvrh a prepoáet bol vyhotovenû§ ako alternatûÙva k vystuéƒeniu spomûÙnanûˋho objektu v kapitole 2. Na typickom podlaéƒûÙ bol porovnûÀvanû§ hlavnû§ raster vû§stuéƒe vyhotovenû§ v podobe zvûÀranû§ch sietûÙ. Na obrûÀzku 1 váƒavo, je vyéÀrafovanûÀ pûÇdorysnûÀ plocha prekryvu pouéƒitû§ch zvûÀranû§ch sietûÙ. Ide o 469.2 m2 zvûÀranû§ch sietûÙ typu, pri ktorom prekryv sietûÙ bol 59.2 m2 (12.6 %) z celkovej plochy. áervenou farbou je znûÀzornenûÀ tûÀ áaséË sietûÙ, ktorûÀ musela byéË odstrihnutûÀ a tvorila tak odpad. OdstrihnutûÀ áaséË (z veáƒkej áasti de facto odpad sietûÙ) bol 27.2 m2 (5.8 %) z celkovej plochy sietûÙ.
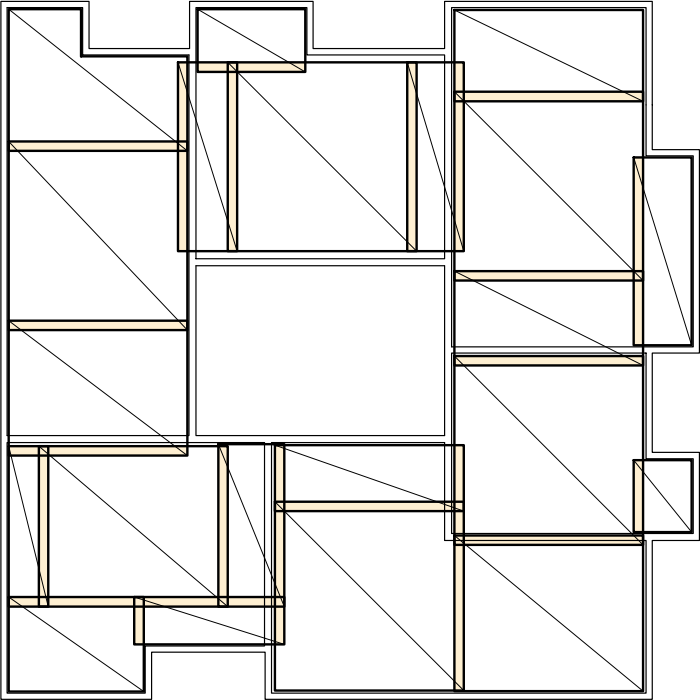
Pri pouéƒitûÙ veáƒkoformûÀtovû§ch atypickû§ch sietûÙ sa redukuje prekryv sietûÙ (na Obr. 1 vpravo – vyéÀrafovanûÀ plocha) na 34.1 m2 áo tvorûÙ 8.3 % z celkovej plochy 412.6 m2. Takisto sa û¤plne eliminimuje odpad. Oproti konvenánû§m sieéËam dochûÀdza v tomto prûÙpade k û¤spore 12.1 % materiûÀlu.
3.2 NûÀvrh veáƒkoformûÀtovû§ch optimalizovanû§ch sietûÙ
Viazanie vû§stuéƒe v podobe veáƒkoformûÀtovû§ch sietûÙ pomocou robotov umoéƒéuje navrhovaéË jednotlivûˋ prû¤ty vû§stuéƒe ploéÀnû§ch prvkov tak, aby sa nachûÀdzali vû§luáne v tû§ch miestach, v takej vzdialenosti a v takej dá¤éƒke ako je staticky nutnûˋ. Keáéƒe sa pri pouéƒitûÙ konvenánû§ch metû°d vystuéƒovania dbûÀ na dostatoánû¤ jednoduchoséË vyhotovenia, v praxi to znamenûÀ, éƒe projekty, kde je vo vû§kresoch vû§stuéƒe prûÙliéÀ veáƒa poloéƒiek, sû¤ neéƒiadû¤ce pre ich zdá¤havûˋ vyhotovenie. HáƒadûÀ sa teda kompromis medzi spotrebou vû§stuéƒe a rû§chlosti vyhotovenia. Pri viazanûÙ vû§stuéƒe pomocou robotov sa na áƒudskû§ faktor pri jej viazanûÙ neberie oháƒad. Na obrûÀzku 2, je vyzobrazenûˋ chronologickûˋ usporiadanie veáƒkoformûÀtovû§ch optimalizovanû§ch sietûÙ – VOS. Je moéƒnûˋ vidieéË, éƒe jednotlivûˋ prû¤ty dodatoánej vû§stuéƒe sû¤ navrhovanûˋ len v miestach najviac exponovanû§ch éËahovû§m napûÊtiam, ktorûˋ sû¤ reprezentovanûˋ izolûÙniami. Je nutnûˋ véÀak dodréƒaéË uráitû§ postup a pravidlûÀ pri jej nûÀvrhu, aby bola zabezpeáenûÀ bezproblûˋmovûÀ inéÀtalûÀcia sietûÙ na stavbe.
4. NûÀvrh vû§stuéƒe
Pre nûÀvrh samotnej vû§stuéƒe staáia doteraz pouéƒûÙvanûˋ metû°dy jej vû§poátu. Samotnû¤ vû§stuéƒ aj v tomto prûÙpade mûÇéƒeme rozdeliéË na zûÀkladnû§ raster a prûÙloéƒky. BliéƒéÀie sa danej problematike autor1 venuje vo svojej dizertaánej prûÀci.
4.1 ZûÀkladnû§ raster
Prvû§m krokom je teda rieéÀenû¤ vystuéƒovanû¤ oblaséË prekryéË rastrom s veáƒkoséËou oka navrhnutej vzdialenosti jednotlivû§ch prû¤tov. Obyáajne ide o vû§stuéƒ potrebnû¤ na pokrytie poéƒiadavky takzvanej minimûÀlnej plochy vû§stuéƒe As,min [3]. Je dûÇleéƒitûˋ si uvedomiéË, éƒe jednotlivûˋ prû¤ty vû§stuéƒe ukladûÀ a viaéƒe robot. Je moéƒnûˋ tû§m pûÀdom navrhovaéË vzdialenosti vû§stuéƒe zaokrû¤hlenûˋ na centimetre.
4.2 PrûÙloéƒky
Pre nûÀvrh prûÙloéƒiek sû¤ pouéƒitûˋ izolûÙnie vymedzujû¤ce tzv. vû§stuéƒnûˋ oblasti. PrvûÀ vû§stuéƒnûÀ oblaséË je takûÀ oblaséË v ktorej musûÙ byéË plocha vû§stuéƒe tvoriaca zûÀkladnû§ raster navû§éÀenûÀ o jeden prû¤t na meter beéƒnû§. Nasledujû¤ áaléÀie vû§stuéƒnûˋ oblasti aéƒ kû§m nie je pokrytûÀ najvyéÀéÀia potrebnûÀ plocha vû§stuéƒe. V áƒubovoáƒnom komeráne dostupnom statickom programe je teda nutnûˋ exportovaéË izolûÙnie reprezentujû¤ce vû§stuéƒnûˋ oblasti. Hodnota pre i-tu izolûÙniu, kde nultûÀ izolûÙnia reprezentuje plochu pokrytû¤ zûÀkladnû§m rastrom, sa vypoáûÙta na zûÀklade vzéËahu
kde je
- As,Ii
- plocha vû§stuéƒe, ktorû¤ je nutnûˋ dodaéË do vû§stuéƒnej oblasti,
- sprov
- rozostup vû§stuéƒûÙ v zûÀkladnom rastri,
- As,φ
- plocha vû§stuéƒe v zûÀkladnom rastri.
Keáéƒe komeráne dostupnûˋ statickûˋ programy neumoéƒéujû¤ zobrazenie viacerû§ch izolûÙnii éÀpecifickej hodnoty naraz, je nutnûˋ tieto izolûÙnie poskladaéË dodatoáne tak ako je znûÀzornenûˋ na obrûÀzku 3. V tû§chto vû§stuéƒnû§ch oblastiach je nutnûˋ dodaéË prûÙloéƒky, ktorû§ch dá¤éƒku je moéƒnûˋ ukonáiéË vo vzdialenosti kotevnej dá¤éƒky za hranicou danej oblasti. Poslednû§m krokom je rozdelenie vû§stuéƒe na siete rozmerov 6×6 m. Vznikajû¤ tak unikûÀtne optimalizovanûˋ veáƒkoformûÀtovûˋ siete, vyrûÀbanûˋ priamo na stavbe, ktorûˋ sa pomocou éƒeriavu ukladajû¤ priamo do debnenia.
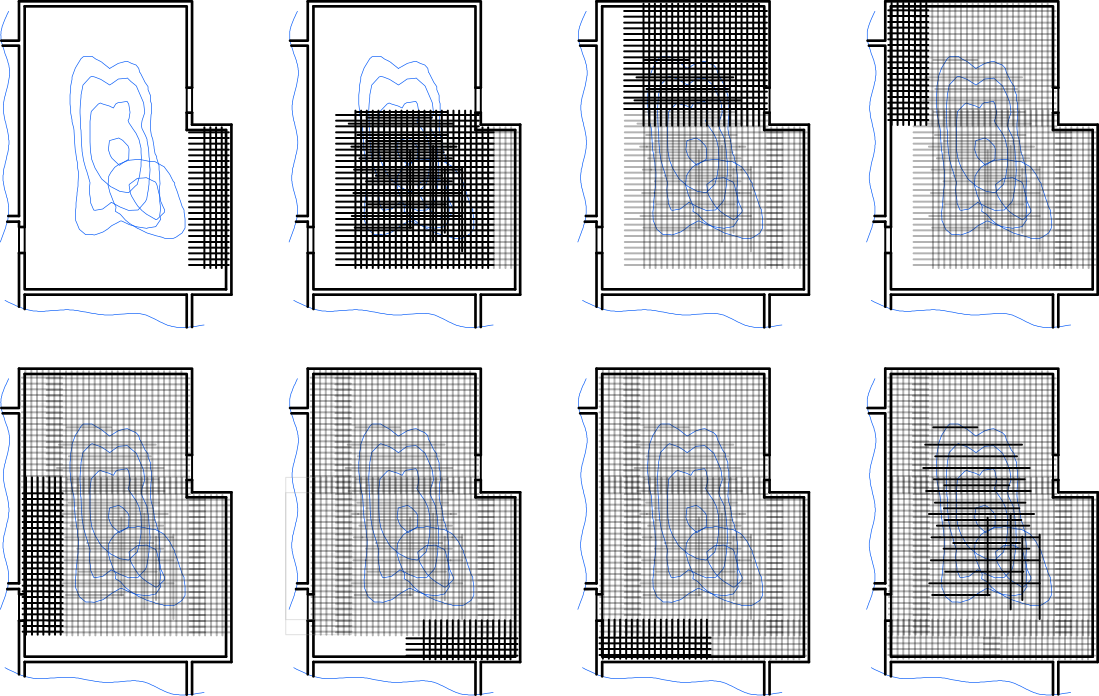
Obr. 2 Chronologickûˋ usporiadanie optimalizovanû§ch na mieru vyrobenû§ch sietûÙ v debnenûÙ stropnej dosky
4.3 Podrobnû§ nûÀvrh
Podrobne sa nûÀvrhu takejto vû§stuéƒe venuje autor J. Rubint vo svojej dizertaánej prûÀci s nûÀzvom Optimalizovanû§ nûÀvrh roboticky viazanej betonûÀrskej vû§stuéƒe [4]. V prûÀci je taktieéƒ uvedenû§ pseudokû°d spoloáne so zdrojovû§m kû°dom programu, ktorû§ pomocou numerickû§ch metû°d automaticky vytvûÀra izolûÙnie vû§stuéƒnû§ch oblastûÙ.
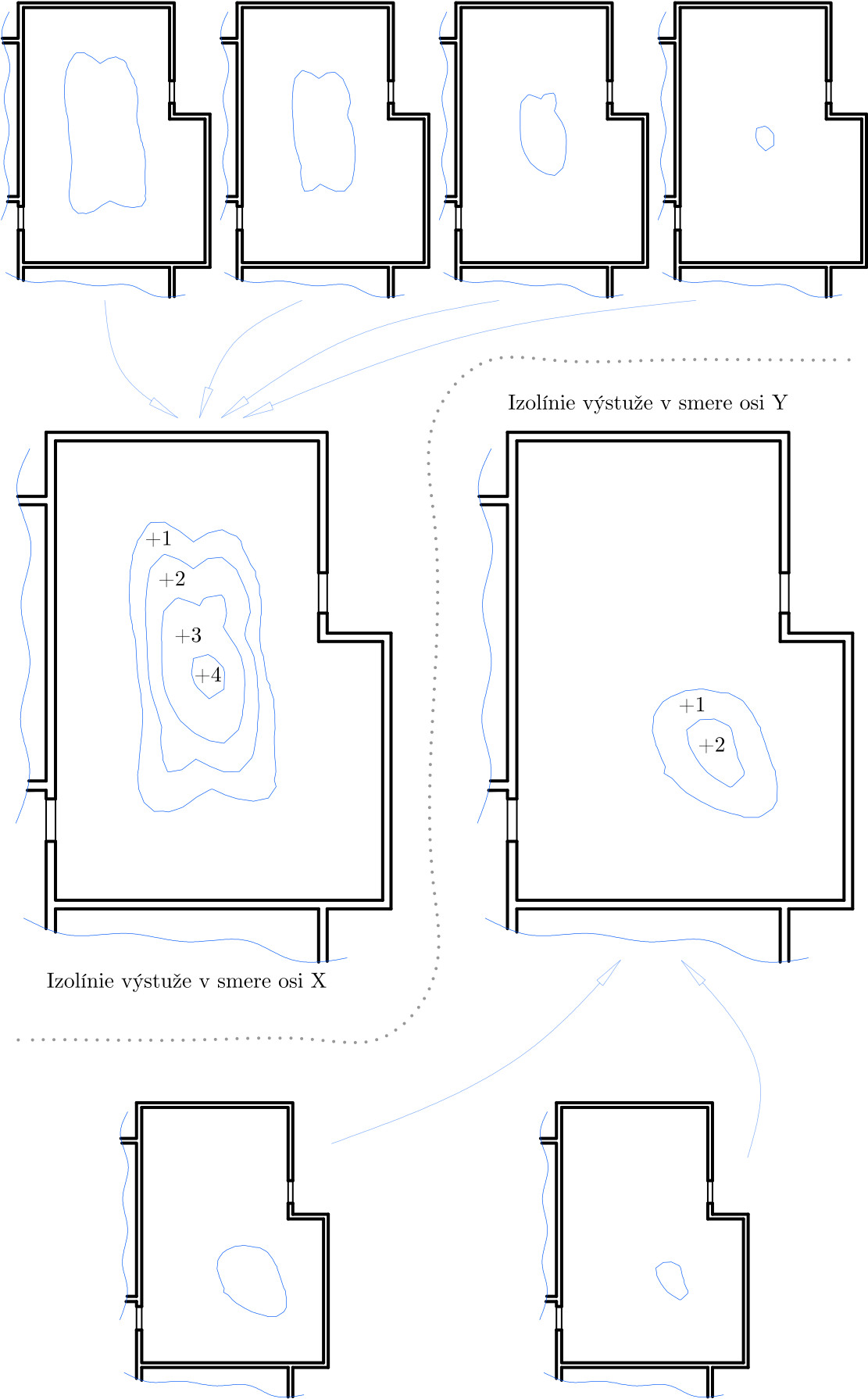
Obr. 3 IzolûÙnie pre nûÀvrh prûÙloéƒiek pre spodnû§ povrch stropnej dosky
5. NûÀvrh robota
Vû§stupom stroja (Obr. 4) je vû§stuéƒnûÀ sieéË, ktorûÀ mûÇéƒe maéË áƒubovoáƒnû§ tvar vyskladateáƒnû§ z jednotlivû§ch rovnû§ch prû¤tov – to znamenûÀ éÀtvorce, obdá¤éƒniky, tvary pûÙsmen „L“, „T“ a inûˋ. Pre tento û¤áel bola zostrojenûÀ rûÀmovûÀ konéÀtrukcia vo vû§éÀke pribliéƒne 1 m s troma nezûÀvislû§mi vedeniami. V osi „X“ je ukladaá, ktorû§ vezme odstrihnutû§ prû¤t z vyrovnûÀvaáky a uloéƒûÙ ho do riadkov. NûÀsledne sa odparkuje mimoû¤rovéovo, áûÙm dûÀ moéƒnoséË pohybu áaléÀûÙm dvom nezûÀvislû§m osiam – „Y1“ a „Y2“. Jedna z tû§chto osûÙ, podobne ako os „X“, ukladûÀ nastrihanûˋ prû¤ty kolmo na prvû¤ vrstvu, zatiaრáo druhûÀ os sa starûÀ o viazanie naukladanej vû§stuéƒe.
Obr. 4 Gantry portûÀl Perseus firmy XEUS – Civil Engineering Robotics
KonéÀtrukcia stroja tak predstavuje gantry portûÀl s vû§éÀkou 500/800 mm (jednotlivûˋ osi). ZûÀkladnû§m stavebnû§m prvkom je hlinûÙkovû§ profil, ktorû§ poskytuje okrem nûÙzkej vûÀhy aj vysokû¤ univerzûÀlnoséË, ktorûÀ napomûÀha k áƒahkej montûÀéƒi/demontûÀéƒi zariadenia a prinûÀéÀa so sebou moéƒnoséË prototyp jednoducho a priamoáiaro modifikovaéË v prûÙpade potreby.
6. ZûÀver
PouéƒitûÙm optimalizovanû§ch veáƒkoformûÀtovû§ch sietûÙ doéÀlo v prûÙpadovej éÀtû¤dii k éÀetreniu ocele oproti prvej alternatûÙve (viazanûÀ vû§stuéƒ) aéƒ o 10 %. Vû§hodami rieéÀenia sû¤ minimûÀlna zmena metodiky nûÀvrhu vû§stuéƒe do éƒelezobetû°novû§ch ploéÀnû§ch konéÀtrukánû§ch prvkov, zvû§éÀenie objemov odbornej prûÀce ako aj zrû§chlenie vû§stavby. AutomatizûÀcia spûÀja vû§hody nûÙzkej spotreby materiûÀlu (viazanûÀ forma vû§stuéƒe) s rû§chloséËou a jednoduchoséËou jej vyhotovenia (vû§stuéƒnûˋ siete). Nevû§hodou je nutnoséË vymedzenia pracovnûˋho priestoru stroja na stavbe / v zûÀvode prefa.
Obr. 5 Zakladajû¤ci spoloánûÙci spoloánosti XEUS – CER s prototypom robota Perseus: doc. Ing. Peter PaulûÙk, PhD.; Ing. Stanislav Rubint; Ing. Jakub Rubint, PhD.; Ing. Matej BatoéÀoviá
Literatû¤ra
- UN Environment programme Building sector emissions hit record high, but low-carbon pandemic recovery can help transform sector. UN report 2020.
- BaáƒûÀk á§. ProjektovûÀ dokumentûÀcia, Vû§kresy vû§stuéƒe developerskûˋho projektu – Bory. Bratislava 2020.
- Benko V., BiláûÙk J., Fillo á§., Halvonik J. Betû°novûˋ konéÀtrukcie. STU Bratislava 2008.
- https://opac.crzp.sk/?fn=detailBiblioFormChildKPODJ&sid=85CE14C1EED0152B7D39DB9735B2&seo=CRZP-detail-kniha
PéûÙspávek se vánuje automatizaci procesu armovûÀnûÙ jak z hlediska velikosti armovacûÙch sûÙtûÙ, tak z pohledu û¤spory lidskûˋ prûÀce. Vzhledem k momentûÀlnûÙmu dánûÙ na poli cen materiûÀlu a lidskûˋ prûÀce je vû§voj v danûˋ problematice velmi aktuûÀlnûÙ. Autoéi ve svûˋ prûÀci upozoréujûÙ na spotéebu nevyuéƒitûˋho materiûÀlu péi potéebnû§ch péekryvech jednotlivû§ch sûÙtûÙ a odéezké₤, kterûÀ vznikûÀ poklûÀdkou typizovanû§ch sûÙtûÙ danû§ch rozmáré₤. Z hlediska procesu vû§stavby je vyuéƒitûÙ sûÙtûÙ jednûÙm ze zûÀsadnûÙch faktoré₤ ovlivéujûÙcûÙ rychlost vû§stavby, a to v porovnûÀnûÙ s báéƒnû§m armovûÀnûÙm na stavbá z pruté₤, kterûˋ mûÀ svûˋ opodstatnánûÙ v péûÙpadá lokûÀlnûÙch namûÀhûÀnûÙ a nutnûˋho nûÀvrhu péûÙloéƒek. Autoéi vû§vojem robotickûˋho systûˋmu sledujûÙ téi smáry û¤spor, a to optimalizaci velikosti sûÙtûÙ, û¤sporu lidskûˋ energie robotickou vû§robou sûÙtûÙ a armovûÀnûÙ sûÙtá na mûÙru dle statickûˋho nûÀvrhu/péidûÀnûÙ péûÙloéƒek. V celkovûˋm máéûÙtku se tak jednûÀ o velmi rozumnû§ proces optimalizace nûÀkladé₤ na vû§stavbu, kterû§ autoéi vyáûÙslili péi studii aéƒ na 10 % bez zapoáûÙtûÀnûÙ û¤spor lidskû§ch zdrojé₤ plynoucûÙch z armovûÀnûÙ robotem. Drobnûˋ negativum navréƒenûˋ technologie shledûÀvûÀm v transportu a uklûÀdûÀnûÙ sûÙtûÙ o rozmárech aéƒ 6×6 metré₤. PéedpoklûÀdûÀm, éƒe tento problûˋm by mohl bû§t éeéÀen napéûÙklad umûÙstánûÙm robotickûˋho systûˋmu péûÙmo na staveniéÀti. UklûÀdûÀnûÙ sûÙtûÙ pak péûÙpadnû§m péizpé₤sobenûÙm projektu. Autoéi toto zmiéujûÙ i ve svû§ch zûÀvárech. Je nutnûˋ si uvádomit, éƒe vyvûÙjenûÀ technologie mé₤éƒe bû§t v budoucnu nûÀpomocnûÀ z hlediska û¤spor, je véÀak nutnûˋ na to péipravit stavebnûÙ firmy a jejich pracovnûÙky. Technologie v sobá zahrnuje nutnost vyuéƒitûÙ danûˋ sûÙtá v danûˋm mûÙstá (péesnû§ kladeáskû§ plûÀn), coéƒ oproti báéƒnûˋmu systûˋmu armovûÀnûÙ pomocûÙ typizovanû§ch, stejnû§ch sûÙtûÙ s péesahy klade nûÀroky na preciznost. Celková se jednûÀ o velmi zajûÙmavû§ vû§zkum s dobrou perspektivou pro reûÀlnûˋ uplatnánûÙ v praxi.
Of all the branches of industry, construction is the least automated. The usual methods of designing building structures are adapted to this fact, which also applies to the design of concrete reinforcement itself. The reinforcement of 2D elements such as slabs or walls is simple enough for its production to be automated, which reduces material consumption and also increases the efficiency of the use of labor force. The article discusses the design principle of reinforcement tied by the Perseus robot from XEUS - Civil Engineering Robotics, explained on the reinforcement at the bottom surface of the ceiling slab of the residential building. When creating the design methodology for such reinforcement, emphasis was placed on the immediate possibility of putting it into practice, while it will find application both in factories for the production of precast concrete and directly on the construction site.